https://corelamps.com/elektormontazhne-obladnannia/rele/
https://sites.google.com/view/hmcinformatic/%D1%96%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D1%96%D0%B9%D0%BD%D1%96-%D1%82%D0%B5%D1%85%D0%BD%D0%BE%D0%BB%D0%BE%D0%B3%D1%96%D1%97/%D1%81%D0%BB%D1%8E%D1%81%D0%B0%D1%80-%D0%B7-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D1%83-%D0%BA%D0%BE%D0%BB%D1%96%D1%81%D0%BD%D0%B8%D1%85-%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D1%85-%D0%B7%D0%B0%D1%81%D0%BE%D0%B1%D1%96%D0%B2/3-%D1%80%D0%BE%D0%B7%D1%80%D1%8F%D0%B4/%D0%B2%D0%B8%D0%BA%D0%BE%D0%BD%D0%B0%D0%B2%D1%87%D1%96-%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D1%96%D0%B7%D0%BC%D0%B8
Конструктор уроків
- Всеосвіта›
- Бібліотека уроків›
- Інформаційні технології›
- Виконавчі механізми

Урок:
Виконавчі механізми
05.12.2024
Вміст уроку:
1
2
1
Для здійснення впливу системи автоматичного керування на об'єкт керування призначені виконавчі пристрої або механізми (aktuators).
Виконавчі механізми — це пристрої або системи, які виконують функцію перетворення вхідного сигналу в механічну дію. Вони широко застосовуються в автоматизованих системах керування, робототехніці, промисловій автоматизації, транспортних засобах тощо.
Основні типи виконавчих механізмів:
1. Електромеханічні
Електродвигуни: змінного або постійного струму, крокові двигуни, серводвигуни.
Соленоїди: створюють прямолінійний рух при подачі електричного сигналу.
2. Гідравлічні
Використовують рідину під тиском для створення руху.
Використовуються там, де потрібна висока сила (наприклад, у будівельній техніці).
3. Пневматичні
Задіяні стиснене повітря або інші гази.
Часто використовуються в робототехніці та системах керування через їхню простоту та швидкодію.
4. Термоелектричні та п'єзоелектричні
Термоелектричні: базуються на зміні температури для створення руху.
П'єзоелектричні: деформація кристалів під впливом електричного поля створює рух.
5. Магнітні
Використовують магнітне поле для створення обертального або лінійного руху.
Характеристики виконавчих механізмів:
Точність: важлива для робототехніки та високотехнологічного обладнання.
Швидкодія: визначає, як швидко механізм може реагувати на вхідний сигнал.
Сила або крутний момент: ключовий параметр для механізмів, що працюють із великими навантаженнями.
Довговічність: залежить від матеріалів і умов експлуатації.
Застосування:
Робототехніка: серводвигуни, крокові двигуни для керування рухом.
Автомобілі: електромеханічні гальма, системи рульового керування.
Авіація: приводи керування поверхнями літака.
Промисловість: автоматизація виробничих процесів, конвеєри, маніпулятори.
Зміна положення регулюючого органу викликає зміну потоку енергії або матеріалу, що поступають на об'єкт, і тим самим впливає на робочі машини, механізми і технологічні процеси, усуваючи відхилення регульованої величини від заданого значення. Виконавчий механізм не лише змінює стан керованого об'єкта, але і переміщає регулюючий орган відповідно до заданого закону регулювання при мінімально можливих відхиленнях. У більшості випадків виконавчі механізми діють від сторонніх джерел енергії, оскільки безпосереднє управління виконавчим механізмом від первинних елементів регулювання (реле, датчиків тощо) неможливе внаслідок їхньої малої потужності, недостатньої для впливу на регулюючий орган.
Виконавчий механізм, як правило, складається з сервомотора постійного або змінного струму та джерела живлення. Ряд виконавчих механізмів включають також підсилювачі.
Якщо датчики перетворюють фізичні величини, що характеризують об'єкт керування, в електричний сигнал, то виконавчі пристрої здійснюють обернену дію, перетворюють сигнал системи керування у фізичну величину, що змінює перебіг технологічного процесу в потрібному напрямі. У сучасних автоматичних системах керування основні операції обробки інформації виконує комп'ютер або мікропроцесор, тому виконавчі пристрої мають здійснювати перетворення цифрового вихідного сигналу комп'ютера у фізичну величину. Наприклад, у станках з числовим програмним управлінням (ЧПУ) вихідний цифровий сигнал з керівного мікропроцесора перетворюється у переміщення робочого органу станка (різця, фрези тощо) і переміщення деталі, що обробляється на цьому станку. У хімічних процесах цифровий сигнал перетворюється у переміщення робочих органів, що регулюють надходження вхідних реагентів, температуру в реакторі тощо.
У складі виконавчого пристрою можна виділити дві частини: малопотужну частину, яка складається з перетворювача (transducer) і підсилювача (amplifier), і потужну частину, що складається з потужного перетворювача (converter) і вихідного виконавчого механізму. В деяких виконавчих механізмах окремі частини можуть бути відсутніми.
Виконавчі механізми характеризуються такими параметрами, як: точність, робочий діапазон, швидкодія, потужність, габарити тощо.
Виконавчі механізми поділяються на двопозиційні (бінарні) й аналогові. За видом споживаної енергії виконавчі механізми поділяють на електричні, пневматичні і гідравлічні. Найбільшого поширення набули електричні ВМ. Пневматичні і гідравлічні виконавчі механізми застосовуються у разі необхідності отримання великої потужності при переміщенні робочого органу та у вибухонебезпечних середовищах.
Конструкції виконавчих механізмів різноманітні. У першу чергу вони розрізняються за характером руху вихідної ланки (прямохідні і поворотні) і за видом чутливого елемента, який перетворює енергію командного сигналу в переміщення вихідної ланки. Вид використовуваної енергії також позначається на конструктивному оформленні виконавчого механізму.
Двопозиційні виконавчі механізми. У системах автоматичного керування досить поширені бінарні виконавчі механізми. За родом фізичної величини двопозиційні виконавчі пристрої поділяються на електричні, механічні, гідравлічні, пневматичні тощо.
Електричні двопозиційні виконавчі пристрої це: вимикачі, перемикачі, комутатори, контактори, реле тощо.
Потужність вихідних сигналів комп'ютера дуже мала (<100 мВт), тому безпосередньо подавати такий сигнал на виконавчі пристрої не можна. Їх необхідно спочатку підсилити. Для цього використовуються керовані вимикачі.
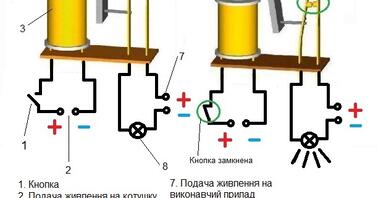
Електромагнітні реле. До винайдення і застосування на практиці напівпровідникових приладів як керований вимикач застосовувалися електромагнітні реле, які продовжують широко використовуватися і в наш час. Електромагнітне реле складається з електромагніта, по обмотці якого протікає струм керування, і контактів, що механічно переміщуються під дією магнітного поля, створеного електромагнітом, замикаючи чи розмикаючи електричне коло виконавчого пристрою.
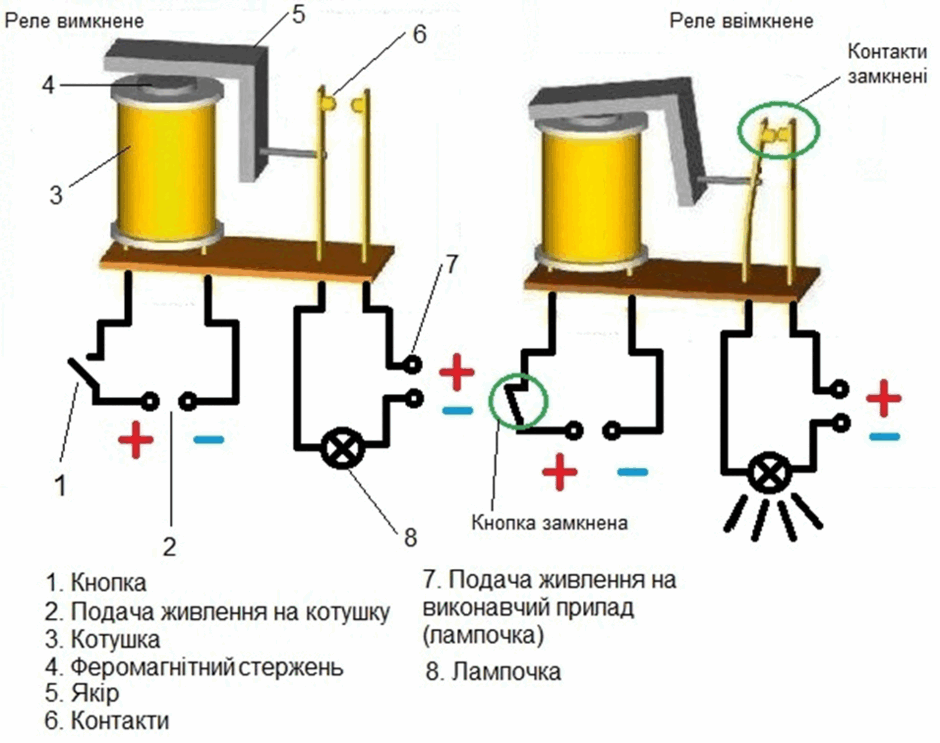
Таким чином, за допомогою електромагнітного реле можна керувати значними струмами, використовуючи незначні.
Важливою властивістю електромагнітного реле є електрична ізоляція керівного і виконавчого електричних кіл, завдяки чому значні струми виконавчих пристроїв не впливають на кола керування, зокрема на коло керування комп'ютера. Електромагнітні реле мають незначний опір контактів у замкненому стані (десяті і соті частки ома) і великий опір, який визначається опором повітряного проміжку в розімкнутому стані.
До недоліків електромагнітних реле слід віднести низьку швидкодію (кілька мілісекунд) порівняно з напівпровідниковими перемикачами, швидкодія яких становить мікросекунди і навіть частки мікросекунд. Крім того, для реле, як і для механічних перемикачів, характерне «брязкання» контактів, тобто багаторазове вмикання і розмикання контактів у перехідному процесі внаслідок механічної інерції після ввімкнення струму в обмотку реле. Обмотка електромагнітного реле вмикається, здебільшого, під номінальну напругу 12 В і споживає струм кілька десятків міліампер, тому не можна безпосередньо керувати реле з виходу комп'ютера, отже потрібний додатковий проміжний підсилювач, наприклад, транзисторний, який встановлюється між виходом комп'ютера і обмоткою реле.
Промисловістю випускаються різноманітні реле в широкому діапазоні потужностей від мініатюрних поляризованих реле потужністю кілька міліват (такі реле часто встановлюють на платах розширення комп'ютерів) до кіловатних контакторів, які встановлюються в окремих стійках, і призначені для керування двигунами значної потужності.
Напівпровідникові вимикачі. Для керування деякими пристроями, наприклад, для керування виконавчими двигунами на основі широтно-імпульсної модуляції, необхідно забезпечити перемикання струмів в електричних колах з швидкодією у кілька мікросекунд. Електромагнітні реле неспроможні забезпечити таку швидкодію, тому застосовують напівпровідникові прилади: біполярні і польові транзистори та тиристори.
Транзистор, що працює в ключовому режимі, виконує функцію керованого вимикача. Ключовим режимом транзистора називається такий режим, коли транзистор знаходиться в одному з двох станів: стані насичення і стані відсікання. У стані насиченні транзистор відкритий, тобто опір між електродами транзистора незначний, і через нього протікає струм. Стан насичення відповідає замкненому вимикачу. У стані відсікання транзистор закритий, між електродами транзистора значний опір. Стан відсікання відповідає розімкненому вимикачу.
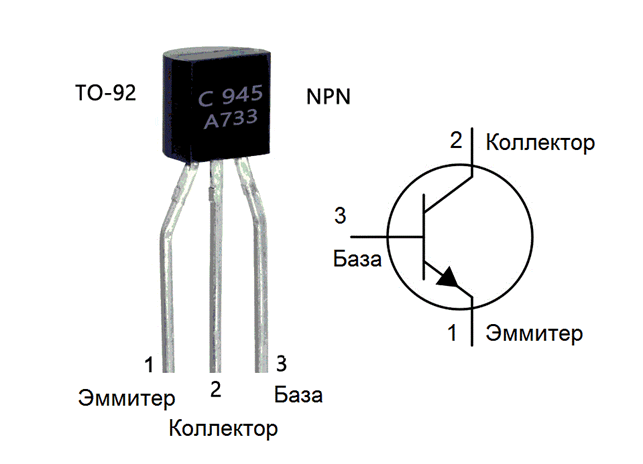
Для керування пристроями з невеликою потужністю можна застосовувати транзистори загального призначення. Щоб керувати пристроями, в яких використовуються напруги більші за 1000 В і струми у кілька кілоампер, призначені напівпровідникові прилади, виготовлені за спеціальними технологіями.
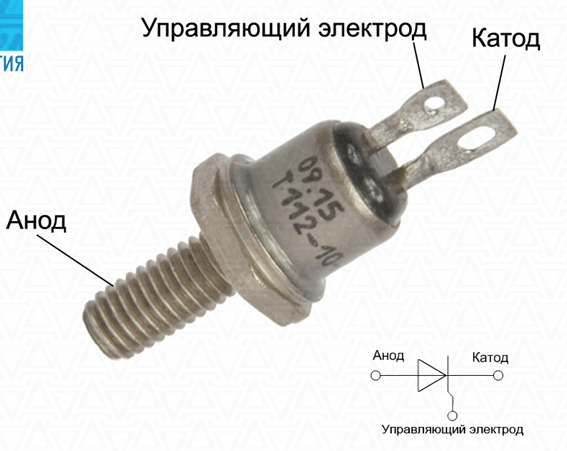
Крім біполярних і польових транзисторів, для комутації потужних електричних кіл застосовуються тиристори. Тиристори можуть знаходитися в одному з двох станів: провідному, коли опір між катодом і анодом становить частки ома, і непровідному, коли опір між електродами становить десятки мегом. Щоб перевести тиристор у провідний стан, на керівний електрод слід подати імпульс. Тиристори порівняно з транзисторами мають значно менший опір у замкненому стані, тому кількість теплової енергії, що розсіюється тиристором, значно менша ніж у транзистора. У той же час, за швидкодією транзистори переважають тиристори.
На відміну від електромагнітних реле, у напівпровідникових приладах немає гальванічного розмежування між вхідними і вихідними електричними колами, і це великий недолік напівпровідникових перемикачів. У польових транзисторів вхідний опір набагато більший ніж у біполярних, і це забезпечує значно менший ступінь впливу вихідних кіл на вхідні. Для забезпечення гальванічного розмежування вхідних і вихідних кіл застосовують передачу сигналу через оптичний канал: керівний сигнал з комп'ютера подають на світлодіод, де він перетворюється у світловий імпульс, що діє на фототранзистор або фототиристор, і переводить його у провідний стан. Сукупність керованого джерела випромінювання (світлодіода) і приймача випромінювання (фототранзистора чи фототиристора), з'єднаного оптичним каналом і розміщеного в одному корпусі, називається оптроном.
Тяговий електромагніт. Тяговий електромагніт складається з обмотки, магнітопроводу і рухомого штока, який є частиною магнітопроводу. Якщо по обмотці пропустити електричний струм, то на шток діятиме сила, спрямована так, щоб зазор зменшувався. Тяговий електромагніт — це виконавчий пристрій для перетворення електричного сигналу в механічне переміщення штока.
Клапани. У багатьох технологічних процесах, наприклад у хімічній промисловості, потрібно керувати подачею рідин і газів. Для цього на трубопроводах подачі встановлені клапани, які дають таким чином: якщо встановити клапан у закрите положення, то подача рідини або газу припиняється, а якщо у відкрите — то відновлюється. Для переміщення клапана застосовуються електричний, гідравлічний або пневматичний приводи.
2

6 грудня 2024
 Романець Андрій Володимирович
Романець Андрій Володимирович
Романець Андрій Володимирович
Романець Андрій Володимирович
Інформаційні технології
I курс
Рефлексія від 1 учня
Сподобався:
0
Так: 1
Ні: 0
Зрозумілий:
0
Так: 0
Ні: 1
Потрібні роз'яснення:
0
Ні: 1
Так: 0