Бібліотека вебквестів
- Всеосвіта›
- Бібліотека вебквестів›
- Інформатика›
- Процесор та його структура АЛП

Вебквест:
Процесор та його структура АЛП

23.05.2022
Вміст вебквесту:
Налаштування гри
Час за який потрібно виконати всі завдання: 1 година
Реакція об'єктів при наведенні: Всі об'єкти неактивні, при наведенні жодним чином не виказують себе
Додано власні фрази, якщо підказка за об'єктом відсутня
Привітання на початку гри (показується учням)
Добрий день! Ось тепер погоня за знаннями може завершитися прямо тут.. Нам потрібно бігти далі, але ми заперті тут, судя чи з всього тут закінчюється кисень для дихання, але мабуть в нас є еще не багато часу знайти пароль від виходу та отримати головне, ключ до всіх знаннь стосовно процесорів та їх структур. Ну що ж, успіхів!

Рівень №1 — Треба вибиратися! переглянути шаблон

Цей рівень містить 21 інтерактивний об'єкт:
1 вихід.
13 сповіщень.
7 сповіщень з введенням відповіді.
Інтерактивні об’єкти на цьому рівні:
Мітка №1/21
Колесо
Вихід з рівня
Щоб вийти потрібен ключ
Повідомлення перед введенням ключа:
Так добре, здається я знайшов вихід, але навіть тут потрібен пароль, так.. Я збирав частинки паролю в цій локаціі, мабуть він підійде?
Ключ:
2056603485793021
Повідомлення після введення ключа:
Фух.. Свіже повітря.. Дуже добре що ми змогли впоратися, теперь в мене є саме головне, знання!
Бажаю тобі успіхів!

Мітка №2/21
Труба 1 => Структура арифметико-логічного пристрою Повідомлення при кліку
Повідомлення при кліку на об'єкт:
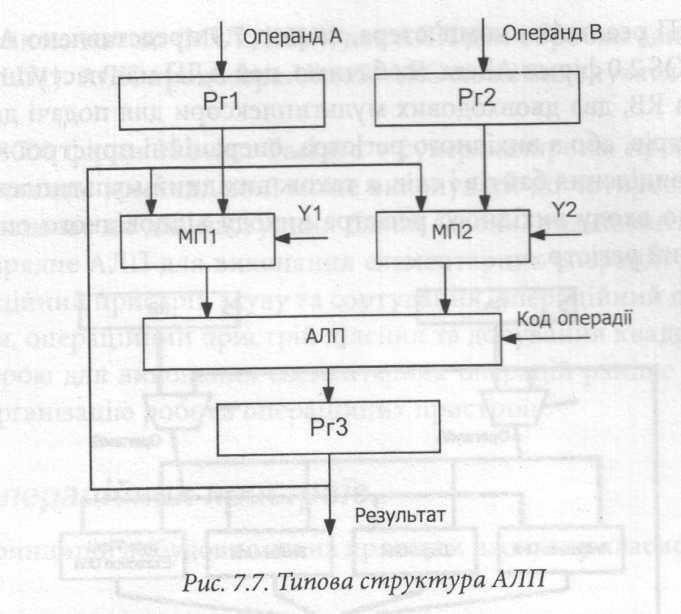
В більшості комп'ютерів АЛП виконує операції над двома вхідними даними, тобто є двомісним, та видає один вихідний результат, як це показано на рис. 7.7. При цьому спочатку операнди А та В записуються у вхідні регістри Ргі і Рг2, та поступають на входи АЛП через мультиплексори МП1 і МП2, які керуються сигналами У1 та У2. Після цього в АЛП виконується задана операція, тип якої задається кодом операції. Результат операції поступає на вихід АЛП та записується у вихідний регістр РгЗ. З виходу вказаного регістра результат поступає в регістровий файл процесора, а крім того, якщо він потрібний для виконання наступної операції, він поступає через мультиплексори МП1 або МП2 на один з входів АЛП, що здійснюється шляхом подання відповідних значень керуючих сигналів на ходи мультиплексорів
В сучасних комп'ютерах АЛП є багатоблоковими. В них окремі групи операцій над кожним типом операндів виконуються окремими блоками, які називаються операційними пристроями. Це дозволяє підвищити продуктивність АЛП за рахунок паралельного виконання операцій. Узагальнена структура АЛП сучасного комп'ютера представлена на рис. 7.8.
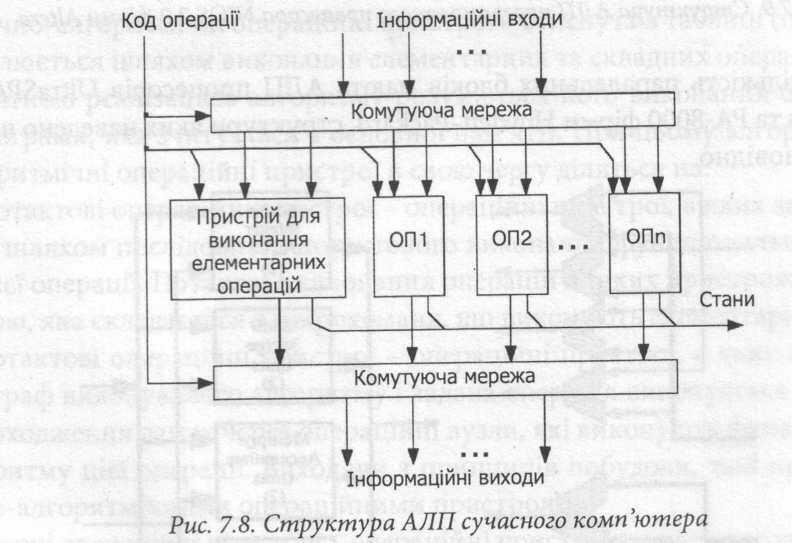
До складу АЛП, крім вищеописаного пристрою для виконання елементарних операцій, входять п операційних пристроїв ОП1, ОП2,ОПn, які виконують складні операції. Кількість п цих пристроїв та їх функції визначаються конструкторами комп'ютера залежно від сфери його використання. Входи та виходи операційних пристроїв АЛП підключаються до його інформаційних входів та виходів за допомогою комутуючих мереж, якими керує код виконуваної операції. Цим же кодом вибирається тип виконуваної операції в пристрої для виконання елементарних операцій та в операційному пристрої, якщо він може виконувати декілька операцій.
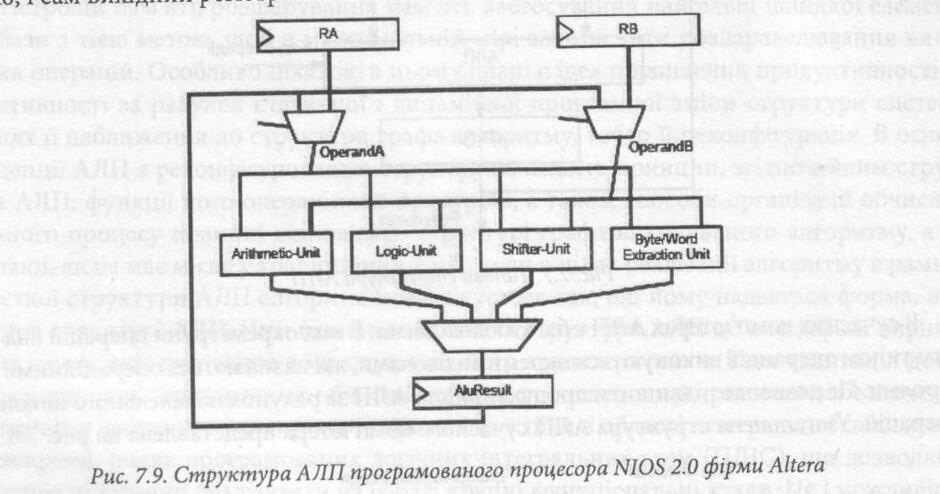
Як приклад АЛП реального комп'ютера, на рис. 7.9 представлено АЛП програмованого процесора NIOS 2.0 фірми Altera. Як бачимо, цей АЛП має наступні блоки: два вхідних регістри RA та RB, два двовходових мультиплексори для подачі даних на обробку або з вхідних регістрів, або з вихідного регістра, операційні пристрої - арифметичний, логічний, зсуву та виділення байтів і слів, а також вихідний мультиплексор, необхідний для підключення до входу вихідного регістра виходу відповідного операційного пристрою, і сам вихідний регістр.
Ще більшу кількість паралельних блоків мають АЛП процесорів UltraSPARC фірми Sun Microsystems та РА-8000 фірми Huwlett-Packard, структури яких наведено на рис. 7.10а та рис. 7.10b відповідно.
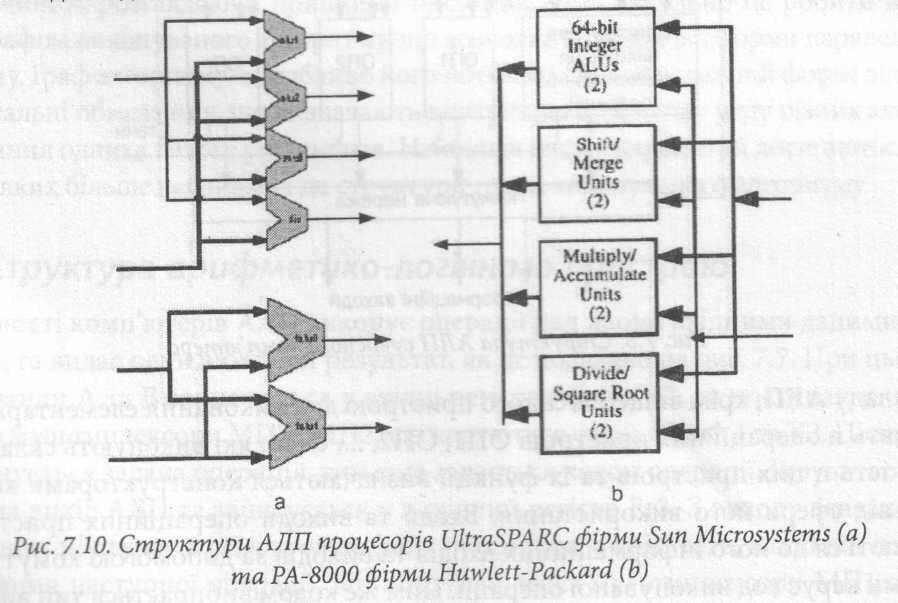
АЛП процесора UltraSPARC фірми Sun Microsystems має два блоки для виконання елементарних операцій над цілими числами (ALU1 та ALU2), перемножувач та подільник чисел з фіксованою комою (MUL, DIV), два АЛП для обробки даних з рухомою комою (FALU0 та FALU1). АЛП процесора UltraSPARC може виконувати до чотирьох операцій за один такт.
Процесор РА-8000 фірми Huwlett-Packard є суперскалярним процесором з невпо-рядкованим виконанням команд, який може виконувати до чотирьох команд за один такт. Його АЛП включає по два наступних блоки (длоки, розміщені зверху донизу на рис. 7.10b): 64-розрядне АЛП для виконання елементарних операцій над цілочисловими даними, операційний пристрій зсуву та сортування, операційний пристрій множення та накопичення, операційний пристрій ділення та добування квадратного кореня.
Мітка №3/21
Труба 2 => Алгоритмічні операційні пристрої Завдання з відповіддю
Завдання:
Ми вже прочитали про структуру АЛП, щоб знайти частину ключа потрібно відповісти на питання.
Скільки блоків для виконання операції має АЛП процесор UltraSPARC фірми Sun Microsystems?
Правильні варіанти відповіді:
2 2 блоки Має 2 блоки Два
Відповідь на завдання:
Пристрої додавання і віднімання двійкових чисел з фіксованою комою
Пристрій для додавання двійкових чисел називається суматором. Суматор використовується в комп'ютері як складова частина АЛП, а також як елемент інших вузлів комп'ютера. Коротко розглянемо основні питання побудови суматора. На рис. 7.18 представлена схема однотактового алгоритмічного операційного пристрою (АОП) додавання і віднімання чисел з фіксованою комою з послідовною обробкою двійкових чисел.
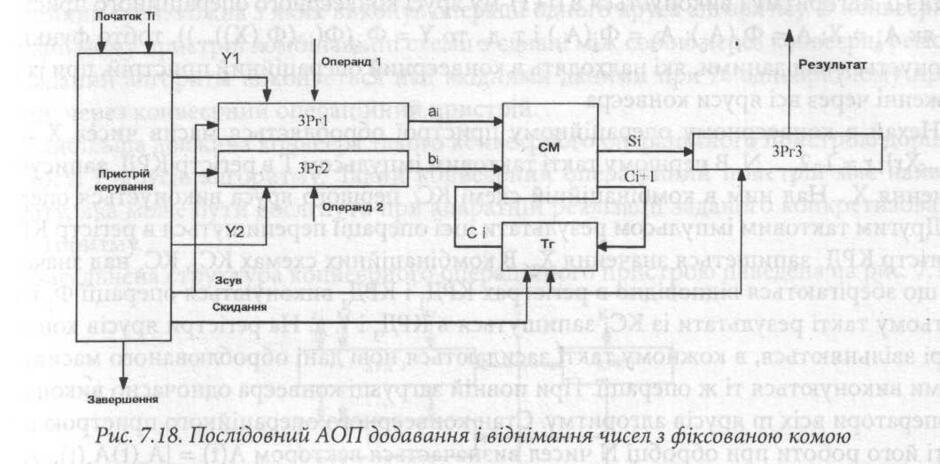
Тут вхідні операнди 1 та 2 записуються сигналами У1 та У2 з пристрою керування до зсувних регістрів ЗРr1 та ЗРr2, виходи молодших розрядів яких з'єднані з входами однорозрядного суматора СМ, вихід суми Si якого з'єднаний з входом старшого розряду зсувного регістра ЗРгЗ. Вихід переносу суматора з'єднаний з входом тригера Тr, який зберігає значення переносу С відповідного розряду протягом одного такту для подачі його на вхід однорозрядного суматора. Перед початком роботи вміст тригера Тr встановлюється в нуль. В кожному такті сигналом зсуву з пристрою керування вміст зсувних регістрів зсувається на один розряд вправо, а в тригер записується значення переносу з чергового розряду суми. Однорозрядний суматор працює відповідно до таблиці істинності з розділу 4 (табл. 4.5). Розряд суми з виходу однорозрядного суматора записується до зсувного регістра ЗРrЗ. Для додавання двох n-розрядних чисел в приведеному пристрої необхідно n - тактів. Після цього на виході пристрою керування з'явиться сигнал завершення роботи, а в зсувному регістрі ЗРrЗ буде знаходитись результат операції.
Перевагою такого пристрою є простота та малі затрати обладнання на реалізацію
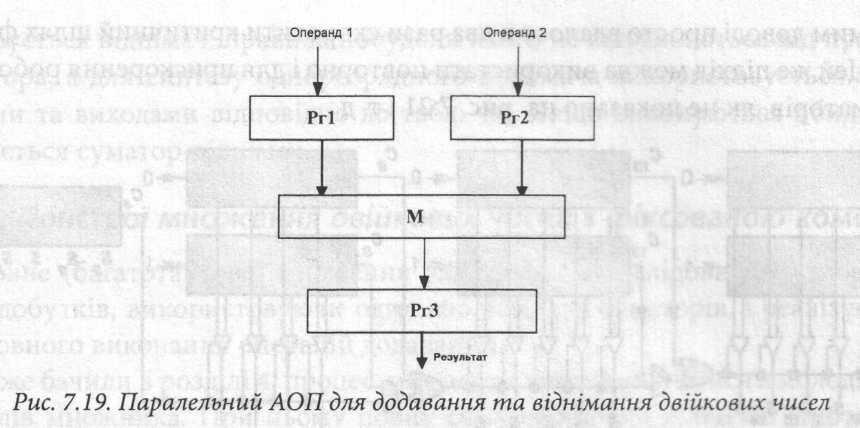
Згідно частіше в комп'ютерах використовуються одно тактові алгоритмічні ОП для додавання і віднімання двійкових чисел (рис. 7.19), в якому всі розряди операндів поступать на паралельний суматор з вхідних регістрів Рrі та Рr2 одночасно. Тим самим, за рахунок паралельної обробки досягається значно вища швидкодія порівняно з порозрядним додаванням операндів.
Однотактовий суматор будується шляхом апаратного відображення графа алгоритму додавання двійкових чисел, тобто шляхом заміни функціональних операторів алгоритму відповідними комбінаційними схемами.
Найпростішим з однотактових суматорів є однотактовий суматор, який апаратно відображає граф алгоритму додавання двійкових чисел з послідовним переносом і відповідно називається суматором з послідовним переносом, Схема цього суматора повторює граф відповідного алгоритму п-розрядного додавання двійкових чисел з послідовним переносом (рис. 4.5). Недоліком суматора з послідовним переносом є значна затримка при формуванні переносу, оскільки для отримання останнього розряду суми перенос повинен бути сформованим всіма попередніми однорозрядними суматорами.
Для зменшення кількості операцій, які знаходяться на критичному шляху, створено ряд алгоритмів додавання, в яких скорочено кількість послідовних операцій при формуванні переносу та відповідних структур суматорів. Це, зокрема, суматори з наскрізним, частково груповим і груповим переносами, в яких здійснюється паралельне формування переносів для всіх розрядів, або для груп розрядів. Досить простою та ефективною є реалізація в суматорі алгоритму за методом вибору переносу.
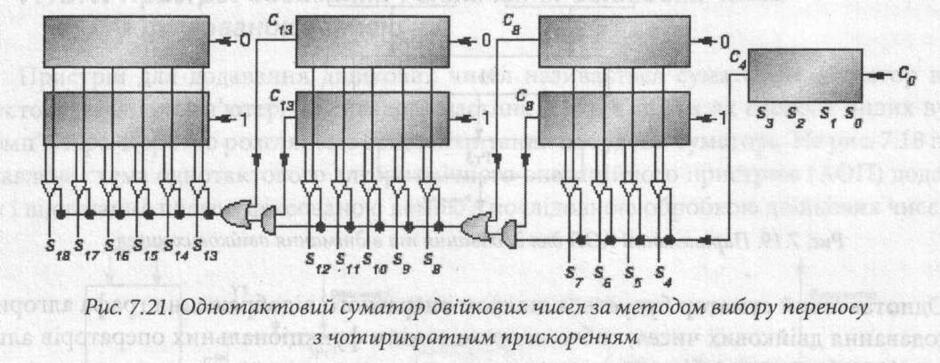
Оскільки питанню побудови ефективних алгоритмів додавання двійкових чисел приділено достатньо уваги в літературі, коротко розглянемо останній з названих вище підходів, тобто реалізацію алгоритму за методом вибору переносу. Розірвавши в довільному місці тракт проходження переносу та сформувавши два тракти його подальшого проходження із значенням вхідного переносу 0 та 1 відповідно, з послідуючим вибором результату за допомогою мультиплексора за значенням реального переносу в місці розриву, отримаємо показану на рис. 7.20 схему суматора.
Тим самим доволі просто вдалося в два рази скоротити критичний шлях формування переносу. Цей же підхід можна використати повторно і для прискорення роботи n/2-розрядних суматорів, як це показано на рис. 7.21 і т. д.
Часто в комп'ютерах використовується пристрій для накопичення rдвійкових чисел, тобто для послідовного багатомісного додавання N чисел (рис. 7.22). В такому операційному пристрої є вхідний Рr1 та вихідний Рr2 регістри, а також суматор, причому один з входів суматора з'єднаний з виходом вихідного Рr2 регістра. Для забезпечення коректної роботи пристрою розрядність суматора повинна бути розширеною в сторону старших розрядів на  .
.
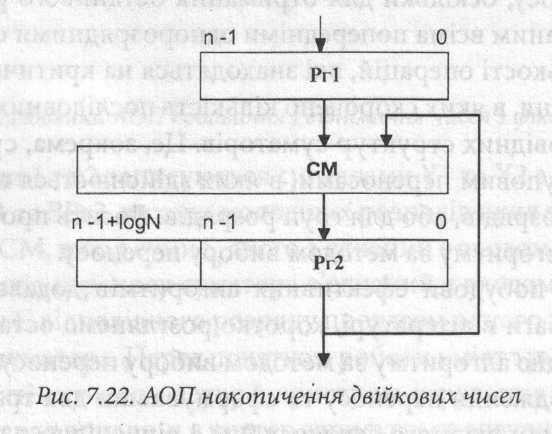
Для прискорення накопичення чисел використовують запам'ятовування не тільки сум з виходу суматора, а й переносів (так звані суматори з запам'ятовуванням переносів). В цьому випадку такт роботи пристрою в режимі накопичення чисел буде визначатися затримкою лише однорозрядного суматора.
Важливим питанням при побудові пристроїв додавання є фіксація переповнення. Для цього аналізується перенос із останнього розряду та знаки операндів. Для спрощення аналізу наявності переповнення використовуються так звані модифіковані коди з двома знаковими розрядами (0-00, 1-11). Незбіжність цих розрядів говорить про наявність переповнення.
Потрібно зауважити, що зазвичай для виконання віднімання використовується додавання, перед яким від'ємник перетворюється в обернений або доповняльний код. Пряме віднімання використовується рідко. Якщо ж така потреба є, то взамін суматора використовується віднімач, правила побудови якого не відрізняються від правил побудови суматора, а для синтезу однорозрядного віднімана використовується залежність між входами та виходами відповідно до табл. 4.6. Якщо виконуються обидві операції - розробляється суматор-віднімач.
Перша частина паролю: 20
Мітка №4/21
Меню => Таблично-алгоритмічні операційні пристрої Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Арифметичні операції в таблично-алгоритмічних операційних пристроях необхідні для обчислення поправки. Ці обчислення можуть базуватися на використанні різних методів, таких як: дробово-раціональні наближення, ітераційні процеси, розкладання в ряди, наближення поліномами, ланцюговими дробами і т. д. При обчисленні таблично-алгоритмічним методом аргумент звичайно розбивається на дві частини. Розбивка аргументу на більшу кількість частин при неконвеєрній реалізації нераціональна через значну кількість додаткових операцій. При конвеєрній же реалізації така розбивка в ряді випадків може виявитися вигідною.
Застосування конвеєрного принципу обробки для виконання арифметичних операцій у таблично-алгоритмічних операційних пристроях дозволяє значно скоротити об'єми пам'яті в порівнянні з прямим табличним методом без зменшення, або і з підвищенням їх продуктивності. Продуктивність операційного пристрою, в якому застосований таблично-алгоритмічний метод, може бути вищою, ніж при використанні табличного методу, тому що швидкодія ПЗП залежить від розрядності операндів п, і, при великих вимогах по точності, може перевершувати затримку в одному ярусі операційного пристрою, яку можна довести до затримки в ПЗП значно меншого об'єму.
Основною проблемою при синтезі таблично-алгоритмічних операційних пристроїв є вибір із всіх існуючих методів обчислення даної функції чи набору функцій найбільш ефективного і визначення оптимальних співвідношень між об’ємом ПЗП і витратами обладнання на арифметичну частину при забезпеченні потрібної продуктивності.
Розглянемо принципи побудови таблично-алгоритмічних операційних пристроїв з використанням часткового підходу при обчисленні поправки на прикладі реалізації тригонометричних функцій.
Розбивши аргумент на дві частини Х=Х1+Х2, утворені його старшими і молодшими розрядами, і скориставшись відомими співвідношеннями:

можна значно скоротити об'єм ПЗП в порівнянні з табличним методом. Структура одно-тактового операційного пристрою, який реалізує наведений алгоритм, показана на рис. 7.43.
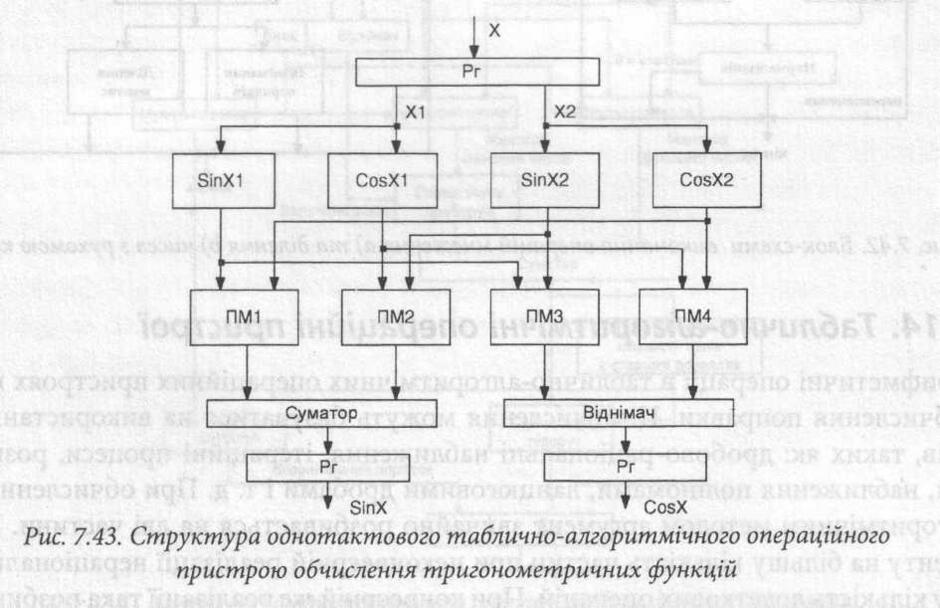
Якщо прийняти, що X1 - ціле число градусів з дискретністю 1, а Х2 - дробове число градусів, з дискретністю 0,01, то неважко підрахувати, що таблиці, котрі зберігають SinХ1 і СоsХ1, будуть містити по 90 15-розрядних слів, а таблиці, що зберігають SinХ2 і СоsХ2- по 1000 15-розрядних слів. Загальний об'єм ПЗП складе 5700 бітів, що в 24 рази менше, ніж при обчисленні табличним методом. В якості ПЗП з уже прошитими значеннями тригонометричних функцій можна використати мікросхеми ДО505РЕ30068-ДО505РЕ300071 ємністю 4 Кбіти кожна. Перші дві мікросхеми містять 8 старших розрядів 512 значень функції SinХ у діапазоні 0...П/4, а дві інші мікросхеми містять значення цієї функції в діапазоні П /4... П/2.
Мітка №5/21
Записка 3 Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Замітка: В тебе є талант!
Мітка №6/21
Записка 7 Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Замітка: Куди же ділися мої речі?
Мітка №7/21
Записка 1 Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Замітка: Я постійно щось забуваю, тому напишу це тут. Моя важлива частина пароля знаходяться під склянкою з черепом та мечами в ньому.
Мітка №8/21
Пляшка 1 Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Друга частина паролю: 56
Мітка №9/21
Стул 3 => Стул Завдання з відповіддю
Завдання:
Начебто тут є люк під стулом, потрібен пароль..
Що ж це таке?

Правильна відповідь:
Взаємодія пристрою керування з іншими вузлами процесора
Відповідь на завдання:
Так, здається це те що мені знадобиться.
Третя частина паролю: 60
Мітка №10/21
Квітка => Функції та методи побудови пристрою керування Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Пристрій керування виробляє послідовність сигналів, необхідних для виконання команди, та послідовності команд, тобто програми. Команда в комп'ютері виконується за один або за декілька тактів, в кожному із яких виконується одна або декілька мікрооперацій. Кожна мікрооперація представляє собою деяку елементарну дію передачі або перетворення інформації, яка ініціюється поступленням керуючого сигналу (мікронаказу) на вхід керування відповідного пристрою. Прикладом може бути керуючий сигнал, який встановлює або очищує прапорець стану, керуючий сигнал запису до регістра, керуючий код на вході мультиплексора і т. д. Для реалізації команди необхідно на відповідні керуючі входи подати розподілену в часі послідовність керуючих сигналів.
Пристрій керування є одним з вузлів процесора. Як приклад на рис. 8.1 показана взаємодія в процесорі між пристроєм керування та арифметико-логічним пристроєм і регістровою пам'яттю.
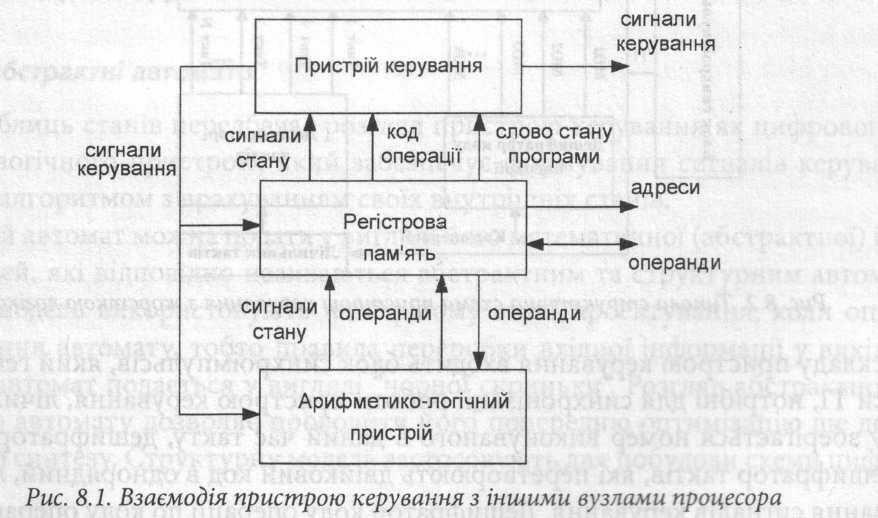
Процес функціонування процесора в часі складається з послідовності тактових інтервалів, в яких арифметико-логічний пристрій виконує операції над операндами та видає результати обробки. Виконання даних операцій арифметико-логічний пристрій здійснює на основі відповідних сигналів керування (мікронаказів) з пристрою керування. Послідовність елементарних мїкронаказїв пристрій керування формує на основі коду операції та службових сигналів стану з регістрової пам'яті процесора.
Відомі два основні методи побудови логіки формування керуючих сигналів. Перший з них виражається в тому, що для кожної команди процесора існує набір логічних схем, які в потрібних тактах збуджують відповідні сигнали керування. Такий принцип керування одержав назву "жорсткої" або "запаяної" логіки.
Другий метод, який дістав назву принципу мікропрограмного керування, передбачає формування керуючих сигналів за вмістом регістра мікрокоманд, в який макрокоманди записуються із пам'яті мікрокоманд. Шляхом послідовного зчитування мікрокоманд із пам'яті в цей регістр організується потрібна послідовність керуючих сигналів.
Крім пристрою керування процесора в комп'ютері можуть використовуватись пристрої керування вузлами комп'ютера, наприклад, пристрої керування операційними пристроями АЛП, пристрій керування процесора введення-виведення і т. д. Принципи побудови вказаних пристроїв є ідентичними
Мітка №11/21
Записка 5 => Структура пристрою керування з жорсткою логікою Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Типова структурна схема пристрою керування з жорсткою логікою (в англійській термінології hardwired control) представлена на рис. 8.2.
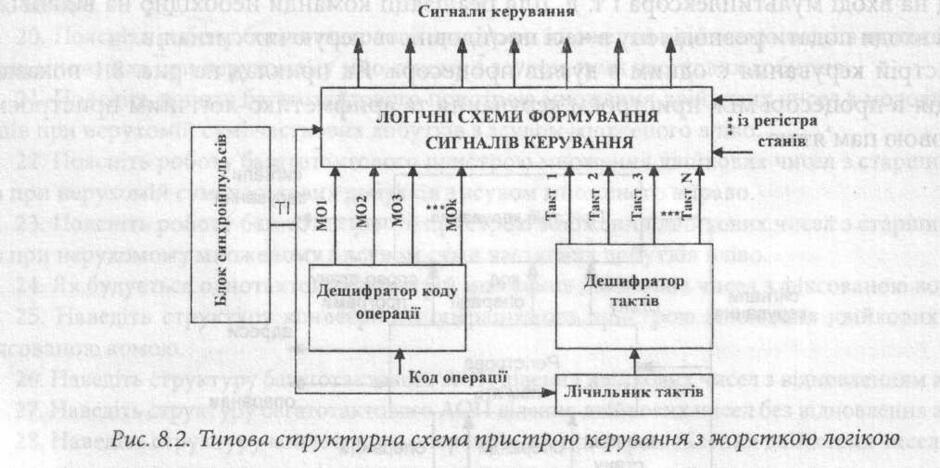
До складу пристрою керування входить блок синхроімпульсів, який генерує тактові імпульси ТІ, потрібні для синхронізації роботи пристрою керування, лічильник тактів, в якому зберігається номер виконуваного в даний час такту, дешифратор коду операції та дешифратор тактів, які перетворюють двійковий код в однорядний, логічні схеми формування сигналів керування. Дешифратор коду операції по коду операції із регістра команд РrК формує сигнал активізації мікрооперації МО на відповідній шині. З кожним тактом до лічильника тактів додається +1 сигналом із блоку синхроімпульсів. Дешифратор тактів формує сигнали, відповідні поточному такту.
Логічні схеми формування сигналів керування відповідно до сигналів із дешифратора коду операції, дешифратора тактів та кодів умов і кодів станів із регістра станів формують сигнали керування для виконання необхідних в даному такті мікрооперацій.
Окрім наведених вище компонентів пристрою керування, до його складу входить контролер послідовності сигналів керування, який отримує тактові імпульси з блоку синхроімпульсів, а також код режиму роботи комп'ютера. Він має два окремих режими роботи: звичайний режим та режим запуску комп'ютера. Контролер послідовності сигналів керування є ядром пристрою керування. Принципи його роботи будуть наведені далі при розгляді пристрою мікропрограмного керування.
Мітка №12/21
Прапорець Завдання з відповіддю
Завдання:
Так я вважаю що тут також щось є, але знов потрібен пароль.
Як буде "Типова структурна схема пристрою керування з жорсткою логікою в терміології на англійскій мові?"
Правильні варіанти відповіді:
hardwired control Hardwired control
Відповідь на завдання:
Так, все вірно!
Четверта частина паролю: 34
Мітка №13/21
Записка 2 => Методи проектування пристрою керування з жорсткою логікою Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Методи проектування пристрою керування з жорсткою логікою, які застосовуються на практиці, часто є спеціально створеними для побудови конкретного пристрою і евристичними за природою, тому не можуть легко бути формалізованими. Для ілюстрації найбільш широко застосовуваних підходів, розглянемо три методи:
Перший метод - це стандартний алгоритмічний підхід до проектування послідовніших схем. Його називають методом таблиць станів, оскільки передбачає побудову таблиць станів пристрою керування.
Другий метод є евристичним і ґрунтується на використанні тактованих елементів часової затримки для побудови часової діаграми керуючих сигналів.
Спорідненим з другим є третій метод, який передбачає використання лічильників для побудови часової діаграми керуючих сигналів.
Перший метод є найбільш формалізованим і дозволяє застосувати методи мінімізації кількості вентилів та елементів пам'яті. Два інші методи є менш формалізовані і передбачають синтез пристрою керування з часової діаграми сигналів керування.
Мітка №14/21
Лампа 1 Завдання з відповіддю
Завдання:
Начебто щось бачу за лампою, тут знов питання, мабуть потрібне мені.
З скількох методів складається: Методи проектування пристрою керування з жорсткою логікою?
Правильні варіанти відповіді:
3 З 3
Відповідь на завдання:
Так, ще частина пароля, добре.
П'ята частина пароля: 85
Мітка №15/21
Чашка => Організація роботи пристрою мікропрограмного керування Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Пристрій мікропрограмного керування виробляє послідовність сигналів, необхідних для виконання програми в комп'ютері. Програма складається з деякої послідовності команд. Команда в комп'ютері виконується за один або за декілька тактів, в кожному із яких виконується одна або декілька мікрооперацій. Кожна мікрооперація представляє собою деяку елементарну дію передачі або перетворення інформації, яка ініціюється поступленням керуючого сигналу (мікронаказу) на вхід керування відповідного пристрою. Послідовність елементарних мікронаказів, які пристрій керування формує в одному такті, називають мікрокомандою. Послідовність мікрокоманд, що необхідно виконати для виконання однієї команди, називаються мікропрограмою. Звичайно, мікропрограма може складатися і лише з однієї мікрокоманди.
Основними принципами, які покладені в основу побудови пристрою мікропрограмного керування, є наступні:
Всі мікронакази, які повинні бути виконані в одному такті роботи комп'ютера, збираються в одне керуюче слово, яке називають мікрокомандою.
Кожній команді з системи команд комп'ютера ставиться у відповідність послідовність мікрокоманд, необхідних для її виконання, тобто мікропрограма виконання команди в комп'ютері.
Всі мікрокоманди зберігаються в пам'яті. Це може бути основна пам'ять комп'ютера, але в більшості комп'ютерів для зберігання мікрокоманд використовується окрема пам'ять, яку називають пам'яттю мікрокоманд.
Для реалізації деякої команди необхідно зчитати з пам'яті мікрокоманд відповідну послідовність мікрокоманд (мікропрограму) та подати розподілену в часі послідовність керуючих сигналів на відповідні керуючі входи вузлів комп'ютера.
На рис. 8.17 показано основний елемент пристрою мікропрограмного керування - пам'ять мікрокоманд, та вузли на її входах і виходах, а саме мікропрограмний лічильник (МКПЛ) для зберігання адреси мікрокоманди та регістр мікрокоманди (РгМК).
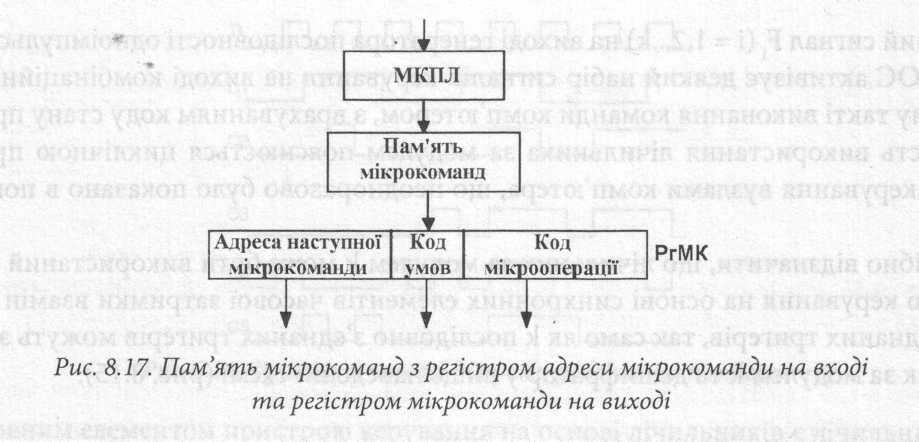
На рис. 8.17 показано і формат самої мікрокоманди,.до складу якої входять наступні поля: код мікрооперації, за яким формуються мікронакази, що виконуються в одному такті роботи комп'ютера, код умов, котрий вказує, при яких умовах може бути змінено послідовність читання мікрокоманд з пам'яті, а також адреса наступної мікрокоманди.
Структура пристрою мікропрограмного керування представлена на рис. 8.18.
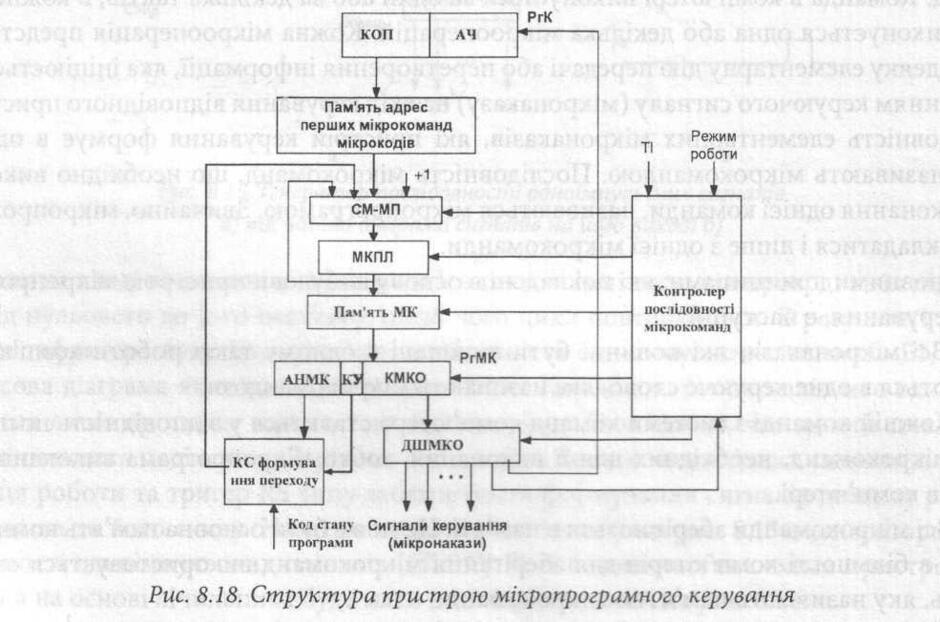
В регістрі команди РгК зберігається команда, яка підлягає виконанню в комп'ютері. За її кодом операції КОП з пам'яті адрес перших мікрокоманд мікрокодів зчитується адреса пам'яті мікрокоманд, в якій знаходиться перша мікрокоманда із послідовності мікрокоманд (мікропрограми, або як її іще називають, мікрокоду) її виконання. Пам'ять мікрокоманд в більшості випадків реалізується на основі постійного запам'ятовуючого пристрою ПЗП, хоча може бути реалізована і на основі оперативного запам'ятовуючого пристрою ОЗП, особливо на етапах відлагодження комп'ютера. В цій пам'яті зберігаються мікрокоманди для всіх команд комп'ютера, а також для початку роботи комп'ютера та для обробки переривань. В схемі формування адреси СФА, до складу якої входять пам'ять адрес перших мікрокоманд мікрокодів, суматор-мультиплексор СМ-МП, мікропрограмний лічильник МКПЛ та комбінаційна схема КС формування переходу, визначається адреса комірки пам'яті мікрокоманд, в якій знаходиться наступна мікрокоманда. Ця адреса формується з врахуванням полів адреси наступної мікрокоманди АНМК та коду умови з регістра мікрокоманди, а також сигналів стану, які поступають з регістра слова стану програми. Мікрокоманда зчитується із пам'яті в регістр мікрокоманди РгМК, в якому вона зберігається протягом одного такту роботи комп'ютера. На основі коду мікрооперації КМКО з регістра мікрооперації на виході дешифратора ДШМКО формуються сигнали керування.
Мітка №16/21
Паперовий стаканчик 2 Завдання з відповіддю
Завдання:
Добре, тепер ми знаємо що "Організація роботи пристрою мікропрограмного керування" включає в себе декілько принціпів роботи, але скільки їх?
Правильна відповідь:
4
Відповідь на завдання:
Так, добре, мабуть в мене ще є шанс втекти звідси!
Шоста частина пароля: 79
Мітка №17/21
лампа 2 => Організація мікропрограм в пам’яті мікрокоманд Повідомлення при кліку
Повідомлення при кліку на об'єкт:
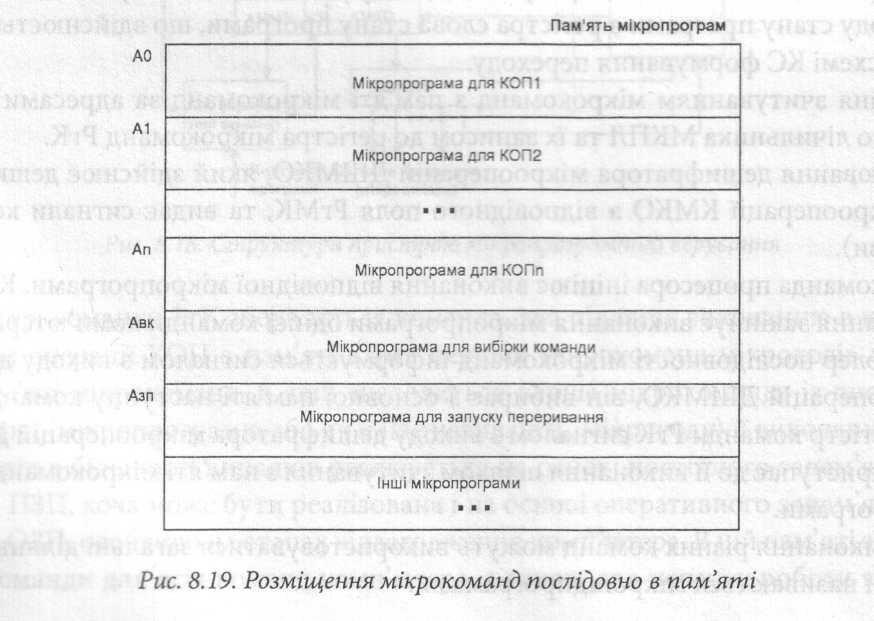
Є багато шляхів можливої організації мікропрограм в пам'яті мікрокоманд. Один з них, ілюстрований на рис. 8.23, передбачає розміщення мікрокоманд в пам'яті послідовно. Кожна машинна команда має свою власну послідовність мікрокоманд в пам'яті мікрокоманд. Додатково пам'ять мікрокоманд містить мікрокоманди для проведення вибірки команд з основної пам'яті, запуску переривання, та деяких інших дій керування.
Розглянемо цей тип організації мікропрограм в пам'яті мікрокоманд. Після того, як пристрій керування вибирає машинну команду з основної пам'яті і розміщує її в регістрі команди РгК, він повинен генерувати так звану адресу точки входу для коду операції команди КОП, яка є адресою першої мікрокоманди мікропрограми. Наприклад, якщо пристрій керування вибирає макрокоманду для коду операції КОПІ, він повинен генерувати адресу АІ, як показано на рис. 8.19. Формування адреси точки входу є задачею пам'яті адрес перших мікрокоманд мікрокодів блоку обчислення адреси (рис. 8.18). Після того, як пристрій керування формує адресу точки входу, контролер послідовності мікрокоманд збільшує вміст мікропрограмного лічильника МКПЛ, щоб одержати адресу кожної наступної мікрокоманди.
Після виконання останньої мікрокоманди в мікропрограмі (тобто, після завершення виконання однієї машинної команди), контролер послідовності мікрокоманд повинен ще раз виконувати мікропрограму вибірки наступної команди з основної пам'яті. На рис. 8.19 це є перехід до комірки Авк пам'яті мікрокоманд. Постає питання - як може контролер послідовності мікрокоманд керувати розгалуженнями в межах мікропрограм пахм'яті мікрокоманд? На рис. 8.18 показано один з варіантів вирішення цього завдання. До цих пір ми розглядали мікропрограми без розгалужень. Однак існують мікрокоманди переходу, які містять адресу переходу та мікронакази для схеми формування адреси СФА додатково до мікронаказів для інших вузлів комп'ютера. Контролер послідовності мікрокоманд разом з схемою формування адреси СФА, використовує адресу наступної мікрокоманди (АНМК) та код умови переходу (КУ) для визначення адреси наступної мікрокоманди.
Для керування переходом в коді мікрооперації КМКО кожної мікрокоманди наявна інформація про належність цієї мікрокоманди до мікрокоманд переходу. Тому в кожному такті на виході дешифратора мікрокоманд ДШМКО генерується мікронаказ, який інформує контролер послідовності мікрокоманд про належність, або неналежність, даної мікрокоманди до мікрокоманд переходу. Якщо це мікрокоманда переходу, то контролер послідовності мікрокоманд повідомляє схему формування адрес про необхідність формування адреси переходу а не приріст на одиницю вмісту мікропрограмного лічильника МКПЛ. При цьому, якщо це безумовний перехід, то перехід відбувається за адресою з адресного поля мікрокоманди. Якщо ж це умовний перехід, то адреса наступної мікрокоманди формується з врахуванням коду умов переходу та коду стану програми, який поступає з регістра стану програми регістрової пам'яті процесора
Мітка №18/21
Стул 1 => Горизонтальне та вертикальне мікропрограмування Повідомлення при кліку
Повідомлення при кліку на об'єкт:
За способом формування керуючих сигналів розрізняють горизонтальне і вертикальне мікропрограмування.
При використанні горизонтального мікропрограмування кожний розряд поля коду мікрооперації мікрокоманди формує один керуючий сигнал (мікронаказ) для відповідного входу керування функціонального вузла комп'ютера (рис. 8.20). Кількість розрядів мікрокоманди визначається з виразу  , де n - розрядність адреси мікрокоманди, яка рівна
, де n - розрядність адреси мікрокоманди, яка рівна  , де N - кількість мікрокоманд в пам'яті, к - кількість мікронаказів, необхідних для керування вузлами пристрою керування, m - кількість мікронаказів, необхідних для керування вузлами комп'ютера. В цьому випадку відпадає потреба в дешифраторі мікрокоманд.
, де N - кількість мікрокоманд в пам'яті, к - кількість мікронаказів, необхідних для керування вузлами пристрою керування, m - кількість мікронаказів, необхідних для керування вузлами комп'ютера. В цьому випадку відпадає потреба в дешифраторі мікрокоманд.

Оскільки у комп'ютерах кількість мікронаказів може досягати декількох сотень, макрокоманда в цьому випадку стає дуже широкою.
Кількість керуючих бітів мікрокоманди зменшують використовуючи наступні способи:
Групуванням бітів. В групи об'єднуються такі мікронакази, які завжди виконуються одночасно. При цьому для групи виділяється лише один біт.
Групування форматів. В групи об'єднуються такі мікронакази, з яких в даному такті виконується тільки один. Ці мікронакази кодуються в полі, де кількість бітів , де L- кількість мікронаказів.
Групування мікронаказів. Групі мікронаказів виділяється один біт мікрокоманди та використовується багатотактова синхронізація.
При використанні вертикального мікропрограмування мікрокоманда складається з полів коду мікрооперації, коду умов переходу і адреси наступної мікрокоманди, як це було розглянуто раніше (рис. 8.17). Тобто формат мікрокоманди подібний до формату команди комп'ютера. Цей метод дозволяє більш ефективно використовувати поля мікрокоманди, тобто команда є коротшою, а об'єм пам'яті меншим, порівняно з горизонтальним мікропрограмуванням. Разом з тим, горизонтальне мікропрограмування є швидшим, оскільки не вимагає використання дешифраторів.
Мітка №19/21
Крюк 2 Завдання з відповіддю
Завдання:
Так здається під крюком також щось є, напевно частина пароля, але треба знов відповісти на питання.
Що це ж таке?

Правильна відповідь:
Формат мікрокоманді при використанні горизонтального мікропрограмування
Відповідь на завдання:
Так добре, все вірно!
Сьома частина пароля: 30
Мітка №20/21
Записка 6 => Порівняння пристроїв з жорсткою логікою та пристроїв мікропрограмного керування Повідомлення при кліку
Повідомлення при кліку на об'єкт:
Вище були розглянуті два основних методи побудови логіки формування сигналів керування. Перший з них, який одержав назву "жорсткої" або "запаяної" логіки, виражається в тому, що для кожної команди процесора існує набір логічних схем, які в потрібних тактах збуджують відповідні сигнали керування. Другий метод, який називають принципом мікропрограмного керування, передбачає формування сигналів керування за вмістом регістра мікрокоманд, в який мікрокоманди записуються із пам'яті мікрокоманд. Шляхом послідовного зчитування мікрокоманд із пам'яті в цей регістр організується потрібна послідовність сигналів керування. Завдяки тому, що мікрокоманди записуються до пам'яті, вміст якої при потребі можна частково, або повністю замінити, пристрої мікропрограмного керування мають наступні основні переваги в порівнянні з пристроями керування з жорсткою логікою:
В них можна використовувати мікропрограми, які вже були відлагоджені та апробовані на інших комп'ютерах.
Шляхом заміни мікропрограми в пам'яті мікрокоманд комп'ютер можна модифікувати з метою покращання технічних характеристик чи розширення функцій, і, тим самим, продовжити термін його використання
Можуть бути використані наробки мікропрограм в наступних поколіннях комп'ютерів однієї сім'ї.
Мікропрограмування є простішим, ніж керування з жорсткою логікою, що спрощує розробку пристрою керування.
Простішим є обслуговування мікропрограмованих комп'ютерів та їх відлагодження завдяки простішій заміні мікрокоманд та мікропрограм.
В швидкодії мікропрограмне керування програє керуванню з "жорсткою" логікою. Тому, завдяки створенню мов опису апаратних засобів комп'ютера та потужних програмних засобів високорівневого проектування, пристрої керування з жорсткою логікою знайшли ширше застосування в сучасних комп'ютерах
Мітка №21/21
Записка 4 => Остання частина пароля Завдання з відповіддю
Завдання:
Так, здається тут є частина пароля, але знов питання.
Скільки переваг є у мікропрограмного керування?
Правильні варіанти відповіді:
5 П'ять
Відповідь на завдання:
Ось, тепер бачу пароль.
Восьма частина пароля: 21
Рефлексія від 0 учнів
Сподобався:
0
Так: 0
Ні: 0
Зрозумілий:
0
Так: 0
Ні: 0
Потрібні роз'яснення:
0
Ні: 0
Так: 0