Кар’єрні машини та комплекси
Модуль 7. Гідромеханізація гірничих робіт.
Тема: Умови використання гідромеханізації, гідромонітори, їх конструкція та характеристика.
Мета: ознайомити студентів з загальними відомостями та умовами використання гідромеханізації, основним обладнанням різних конструкцій та призначення, яке використовується для руйнування породи водою.
План:
Загальні відомості та умови використання гідромеханізації.
Класифікація гідромоніторів.
Гідромонітор з ручним керуванням.
Гідромонітор з дистанційним та автоматичним керуванням.
Самохідні гідромонітори на крокуючому ході.
Спосіб механізації земляних і гірничих робіт, при якому всі або основна частина технологічних процесів здійснюється за рахунок енергії рухомого потоку води, називається гідромеханізацією. У гідромеханізації використовується обладнання різних конструкцій і призначення: гідромонітори, насоси, землесоси та ін.
Руйнування гірничої породи водою проводиться двома способами: розмивом напірним струменем або самопливним розмивом потоком, що надходить до всмоктувальної труби землесоса.
При першому способі робіт вода насосом по водоводу подається до гідромонітору, з насадки якого під тиском та зі швидкістю до 80 м/ с направляється на забій і руйнує його.
Розмита порода разом з водою утворює гідросуміш, яка називається пульпою. Вона характеризується консистенцією, під якою розуміють співвідношення твердої і рідкої фаз в пульпі (Т:Ж). Розрізняють об'ємну консистенцію і масову. Перша визначається відношенням обсягу породи з природною пористістю до об'єму води, а друга — співвідношенням мас породи і води.
Утворена пульпа стікає по грунту до зумпфу, звідки засмоктується грунтонасосом (землесоси) і перекачується по трубах до місця укладання (гідровідвалу), де вона відстоюється. При відстоюванні порода відділяється від води і залишається у відвалі, а освітлена вода через водозбірний колодязь по канаві потрапляє до насосної станції для повторного використання або скидання в природне джерело води.
Для самопливного руху пульпи від вибою до зумпфа підошві уступу надається ухил, внаслідок чого частина породи залишається нерозмитою, утворюючи недомив. Недомив прибирають бульдозерами або екскаваторами, які укладають породу у відвал, який змивається струменем гідромонітора в зумпф.
Інтенсивність розмиву характеризується обсягом гірничої породи, яка розмивається 1 м3 води. Збільшення висоти уступу до певної межі збільшує інтенсивність розмиву. Вона також зростає із збільшенням витрати води, зменшенням відстані від гідромонітора до забою і підвищенням компактності струменя. Підвищення тиску струменя гідромонітора доцільно тільки до певної оптимальної межі.
Руйнування гірничої породи потоком, який притікає до всмоктувальної труби, відбувається при розробці забою плавучим землесосним снарядом (землесоси). Встановлений на понтоні землесос засмоктує по трубі воду разом з породою і нагнітає пульпу в напірний трубопровід, від якої вона по трубопроводу, покладеному на поплавцях, транспортується до місця укладання. У усмоктувальну трубу залучаються лише частинки, розташовані в зоні всмоктування, де швидкість потоку достатня для подолання зчеплення частинок між собою і їх ваги. Зв'язні породи таким способом руйнуються дуже погано, тому землесосні снаряди забезпечуються розпушувачами.
Гідромеханізація при відкритому видобутку корисних копалин має відносно невелике поширення.
Гідромонітор - пристрій для створення і управління польотом напірних водяних струменів з метою руйнування і змиву гірничих порід.
За своїм конструктивним особливостям гідромонітори класифікуються за такими ознаками:
способом управління — з ручним і дистанційним управлінням;
способом пересування — несамохідні (пересувні вручну, тракторами, лебідками та іншими способами), на полозках або волокушах платформах і самохідні;
робочого відстані — далекого і ближнього бою;
робочого тиску — з низьким (до 1,2 МПа) і високим (понад 1,2 МПа).
Найбільш широке поширення на кар'єрах мають несамохідні гідромонітори дальнього бою (високонапірні) з ручним або дистанційним керуванням.
Гідромонітори з ручним управлінням мають бути легко керованими зусиллям однієї людини, повинні забезпечувати мінімальні втрати тиску води, компактність струменя і збереження її на шляху до забою, а також мати невелику масу.
Несамохідний гідромонітор далекого бою з ручним керуванням показаний на рис. 1, а. Його основними частинами є: нижнє 1 і 2 верхнє коліна, стовбур 3, насадка 4, шарніри 5 і 6 для повороту стовбура гідромонітора відповідно у горизонтальній (щодо нерухомого нижнього коліна) і вертикальної (підйом і опускання ствола) площинах. Нижнє коліно через фланець приєднується до трубопроводу (водоводу). Гідромонітор встановлений на санях 8, під які часто підкладають опорний лист з загнутими краями.
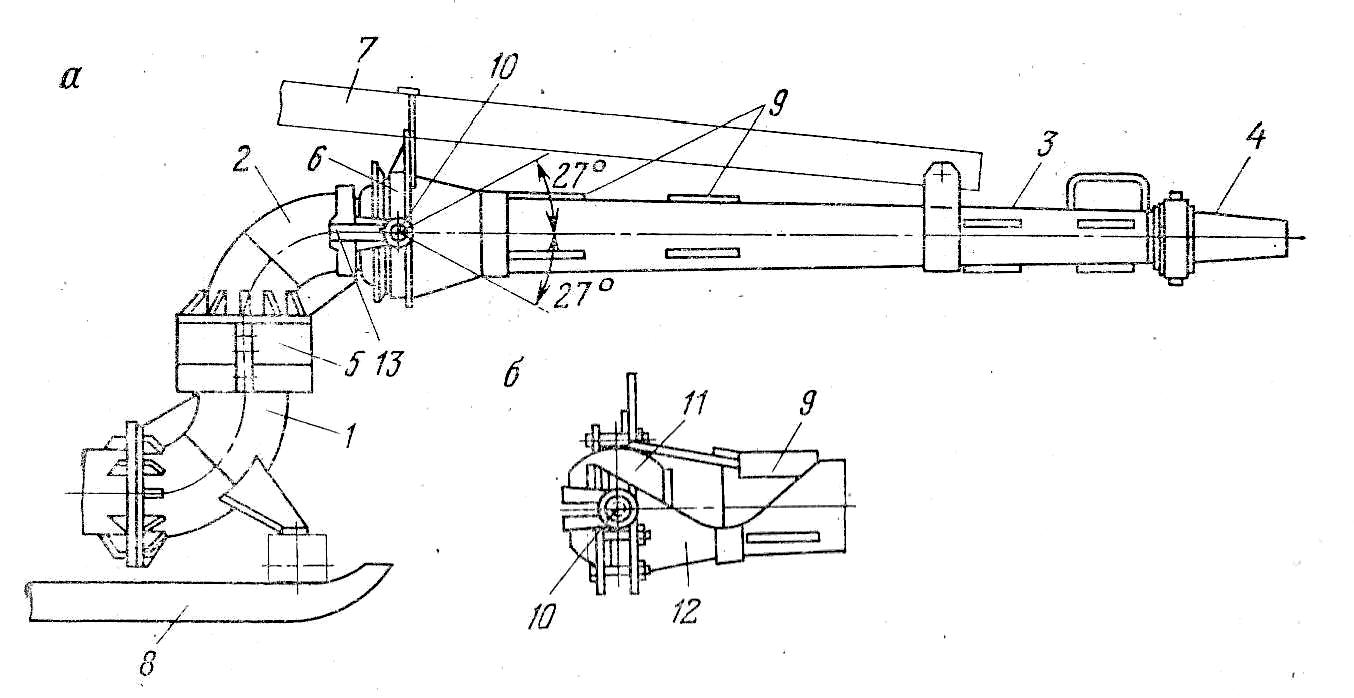
Рис. 1. Гідромонітор далекого бою з ручним керуванням:
а - загальна схема; б, в — кульовий і горизонтальний шарніри співвідношення
Створення компактного струменя досягається з допомогою стовбура з направляючими струмінь внутрішніми ребрами 9 і насадкою з відшліфованої внутрішньою поверхнею. Для повороту стовбура застосовується водило 7, до вільного кінця якого в більшості випадків кріпиться противага, призначена для врівноваження стовбура.
Кульовий шарнір (рис. 1, б) складається з порожнистої усіченої кулі 11 і оголовка 12, що має також внутрішню кульову поверхню. Куля кріпиться до верхнього коліна 2, має кронштейни 13, з допомогою двох з'єднувальних пальців 10, виконують роль розрізної осі для повороту.
Горизонтальний шарнір 5 дозволяє повертатися в горизонтальній площині верхньому коліну 2 відносно не рухомого коліна 1 на 360° на упорному підшипнику.
По довжині стовбур гідромонітора розділений на дві частини, кожна з яких забезпечена своїми напрямними ребрами, зміщеними по відношенню до положення ребер в іншій частині на 60°.
Для управління гідромонітором до стовбура кріпляться дерев'яні або металеві важелі (водила). Стовбур гідромонітора у вертикальній площині може бути опущений на 18-27° або піднято на 27-40° по відношенню до горизонталі. Довжина насадки встановлюється не менше 2-2,5 діаметрів вихідного отвору. Вихідний отвір насадки переходить у циліндричну частину довжиною не менш одного діаметра. Циліндрична частина насадки служить для заключного формування струменя і додання їй стійкої форми при виході з проточного каналу гідромонітора.
На відкритих роботах найбільше поширення отримали гідромонітори ГМН-250С.
Гідромонітори з дистанційним і автоматичним управлінням. В останні роки розроблені спеціальні гідромонітори з гідравлічним і електрогідравлічним дистанційним управлінням.
Гідромоніторна установка з дистанційним електрогідравлічним керуванням (рис. 2.) складається з одного або двох гідромоніторів 1 типу ГМД-250, насосної станції 6, переносного пульта керування 7 і кабіни 8. Пульт управління пов'язаний з гідроприводом рукавами 4 високого тиску. Поворот стовбура в горизонтальній і вертикальній площинах виконується відповідно гідроциліндрами 2 і 3. Джерело енергії для живлення насоса гідросистеми - енергія напору води у водогоні, яка обертає його приводну турбінку.
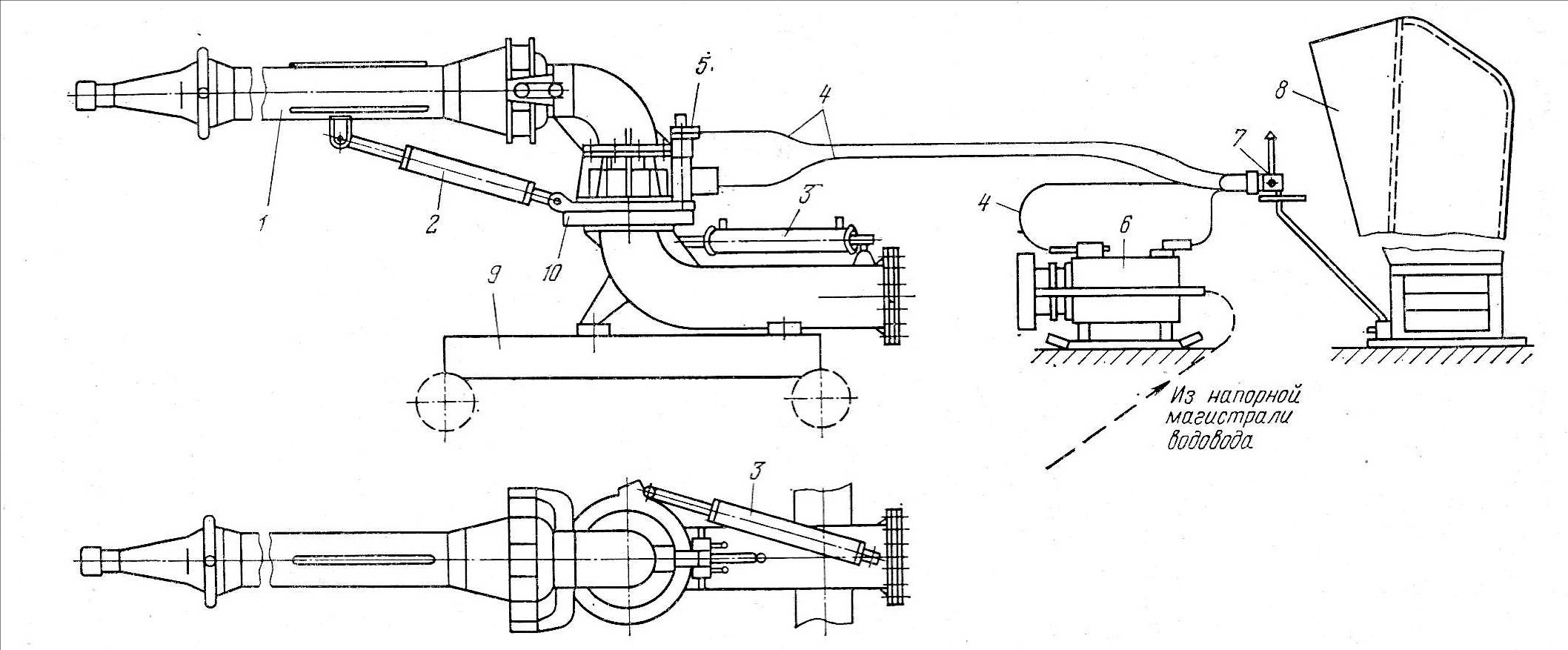
Рис. 2. Гідромонітор ГМД-250 з гідравлічним дистанційним управлінням
Шарнір 10 горизонтального повороту має гідрозамок 5, що забезпечує стопоріння зовнішньої обойми шарніра щодо кільця, встановленого на нижньому неповоротному коліні. При роз'єднаному замку гідроциліндр 3 повертає тільки кільце, зробивши перехватні операції, а стовбур при цьому залишається нерухомим або може бути повернений уручну на потрібний кут. При закритті замку кільце каретки з'єднується з обоймою шарніра і поворот стовбура здійснюється гідроциліндром. При двох перехопленнях стовбур може бути повернений на 360°. Гідромонітор монтується на санчатах 9.
Гідравлічна система управління часто вимагає великої довжини високонапірних рукавів, що є головним недоліком таких систем.
На гідромоніторах, наприклад ГМДУ-250, застосовуються електрогідравлічні системи дистанційного управління з пульта, встановленого на відстані до 30 м.
Електропровід системи, насос і маслобак розташовуються безпосередньо у гідромонітора на спеціальному патрубку, сполученому з нижнім коліном.
Із збільшенням водопродуктивності гідромоніторів зростає їх маса, у зв'язку з чим з'явилася необхідність оснащувати їх крокуючим ходовим пристроєм (рис. 3).
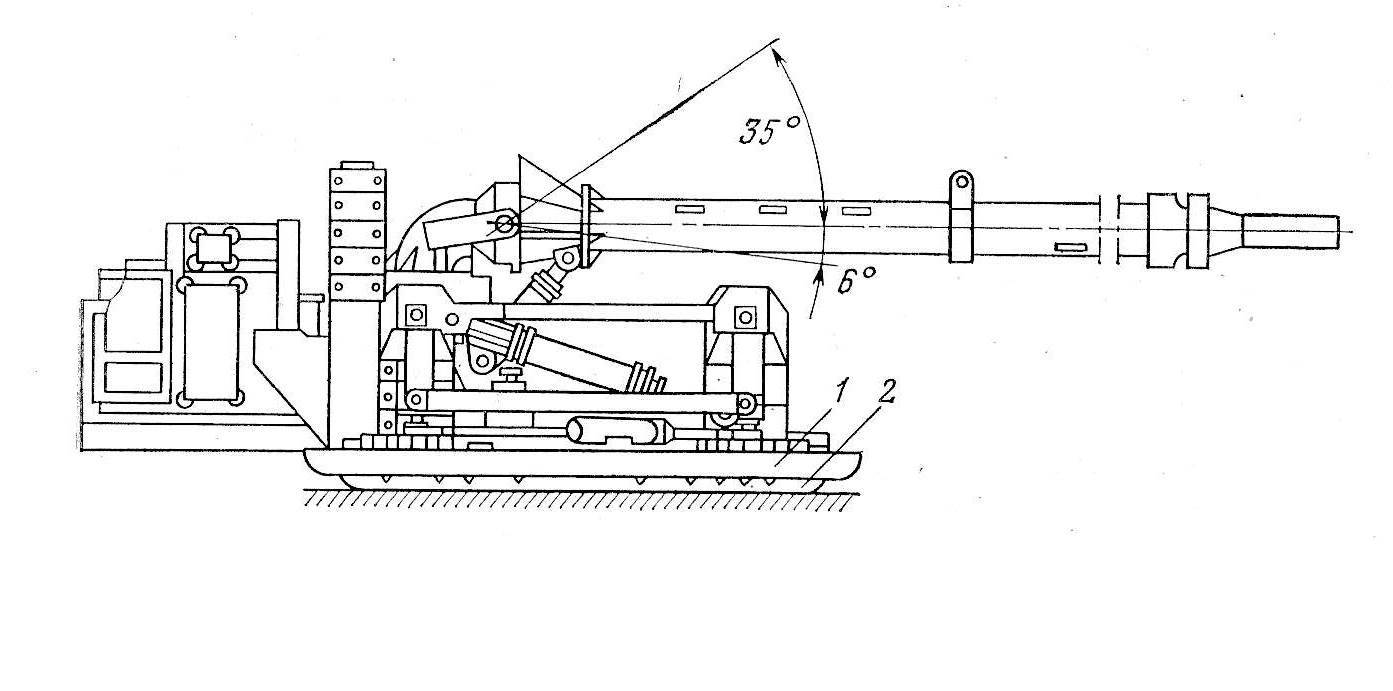
Рис. 3. Самохідний гідромонітор ГМСДШ-300 місто, що ходить на ходу
Крокуючо-ходовий пристрій гідромонітора 1 аналогічно крокуючому ходовому пристрою драглайнів, однак може мати і відмінності, так як для гідромоніторів більш доцільно хитання здійснювати з повним відривом бази 2.
Самохідні гідромонітори не володіють достатньою мобільністю з-за наявності телескопічних зв'язків.
Гідромонітори на крокуючому ході типу ГМСДШ мають дистанційне керування і призначені в першу чергу для розробки розкривних (зв'язкових) глинистих порід. Їх ходова частина і стовбур змонтовані на платформі. Рух стовбура в горизонтальній і вертикальній площинах здійснюється за допомогою гідроциліндрів. Для підвищення ефективності розмиву порід стовбур під час роботи автоматично погойдується в горизонтальній площині. Кут похитування регулюється з пульта управління.
Крокуюча ходова частина складається з гідроциліндрів підйому, переміщення і повороту і двох лиж. За принципом дії крокуюче ходове обладнання гідромонітора відрізняється від екскаваторного тим, що база і сам гідромонітор під час крокування зберігають горизонтальне положення.
Самохідні гідроциліндри розраховані на роботу за схемою «один гідроциліндр - один грунтонасос (землесос)».
Для подальшого транспортування зруйнованої і змитої в зумпф породи використовують автономні гідротранспортні установки, що складаються з ґрунтових насосів, всмоктувальних і транспортних трубопроводів та системи управління.
Контрольні питання:
Охарактеризуйте поняття «гідромеханізації».
Яке основне обладнання використовується при проведенні гідромеханізації?
Які існують способи руйнування гірничої породи водою?
Охарактеризуйте спосіб розмиву породи напірним струменем.
Охарактеризуйте спосіб розмиву породи самопливним потоком, який надходить до всмоктувальної труби землесоса.
Як класифікуються гідромонітори?
Охарактеризуйте принцип роботи і будову гідромонітору з ручним управлінням.
Охарактеризуйте принцип роботи і будову гідромонітору з дистанційним та автоматичним управлінням.
Література:
Р.Ю. Подэрни Горные машины и комплексы для открытых работ: Учебное пособие. В 2 т. Т. 2. – 4-е изд., стер. – М.: Издательство МГГУ, 2001.
Г.Г. Нанаева, А.И. Нанаев Горные машины и комплексы для добычи руд. Учебник для техникумов. 2-е изд., перер. и доп. М., Недра, 1982.