МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №01 з дисципліни:Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія» Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Кінематика - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
2. Вектор швидкості характеризує : | ||
| 1 | траєкторію руху точки; |
| 2 | бистроту руху точки; |
| 3 | час рух точки. |
3. Прискорення характеризує: | ||
| 1 | зміну траєкторії руху точки; |
| 2 | зміну швидкості за модулем і напрямком; |
| 3 | бистроту руху точки. |
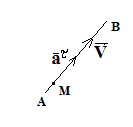
4. Указати рівняння руху точки: | ||
| 1 | |
| 2 | V= |
| 3 | |
5. Швидкість точки при рівномірному русі визначається за формулою: | ||
| 1 | V= |
| 2 | |
| 3 | |
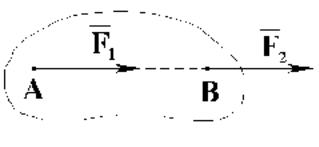
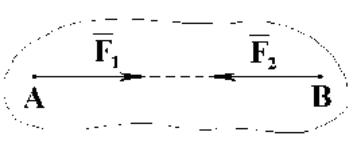
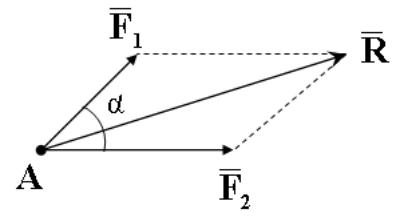
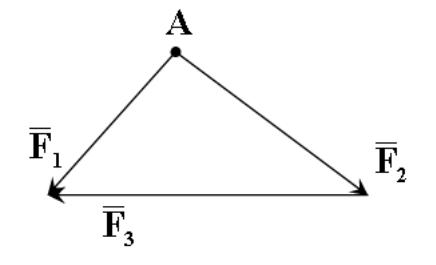
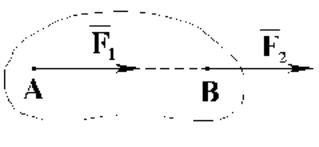
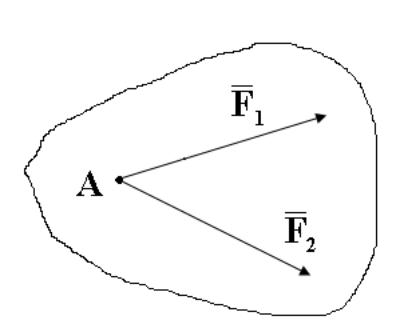
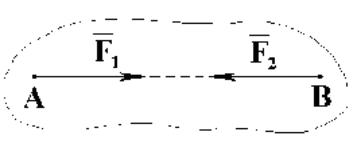
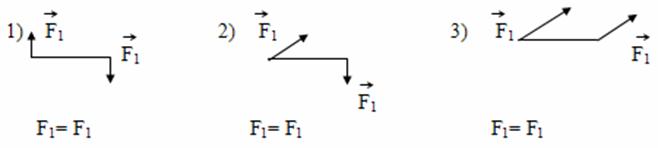
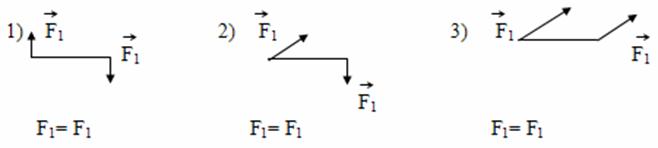
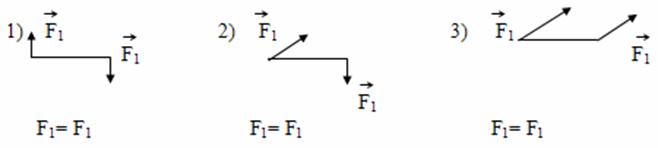
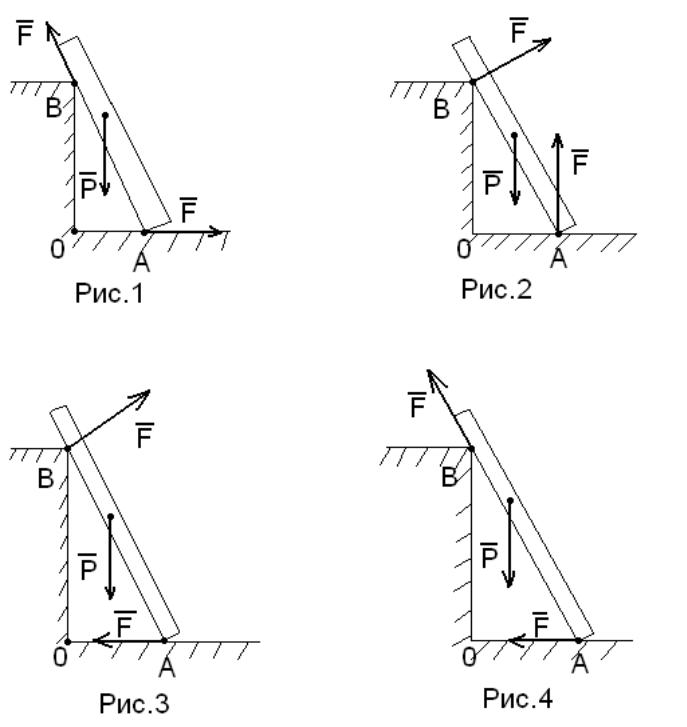
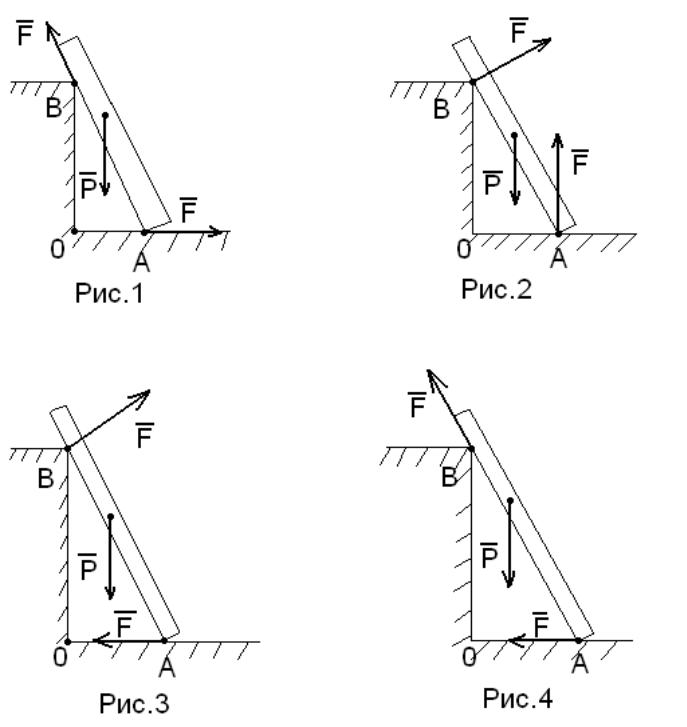
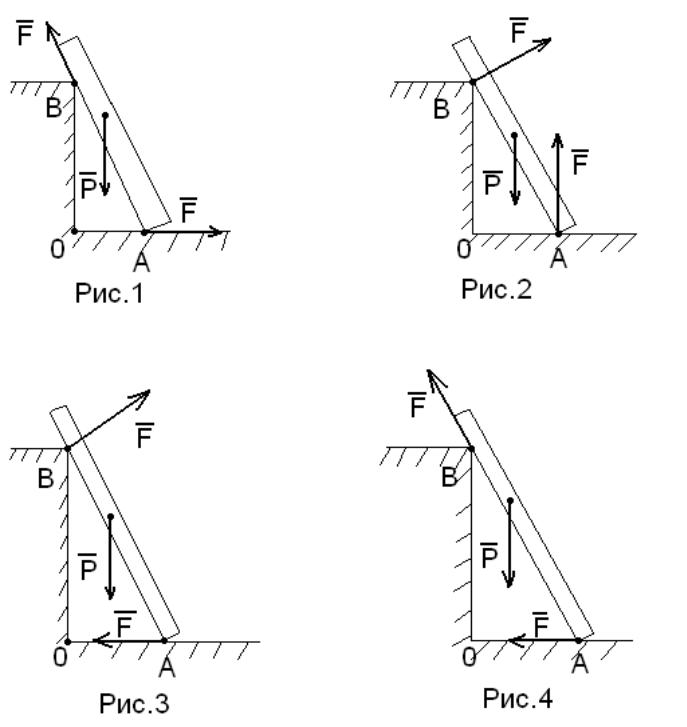
6. Аксіому про дві сили ілюструють рисунки | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
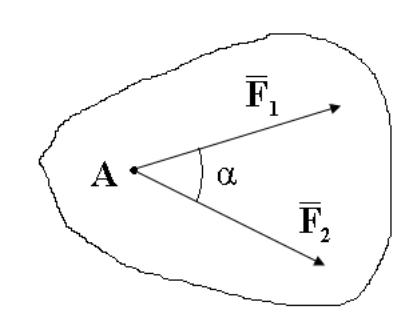
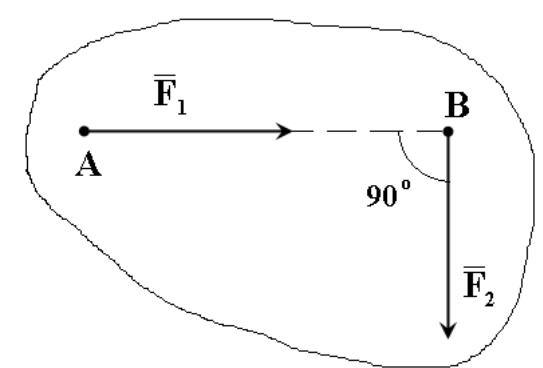
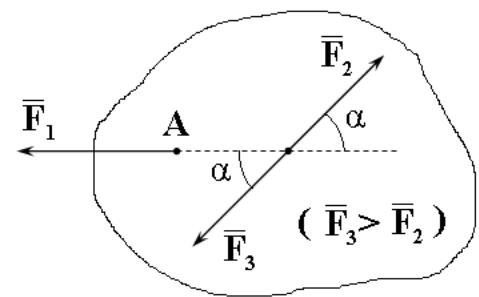
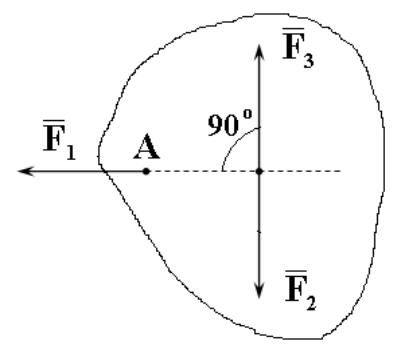
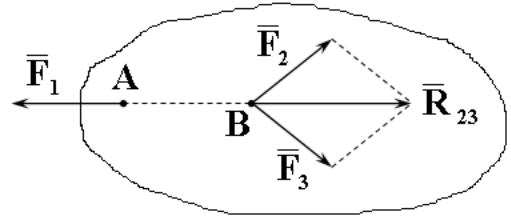
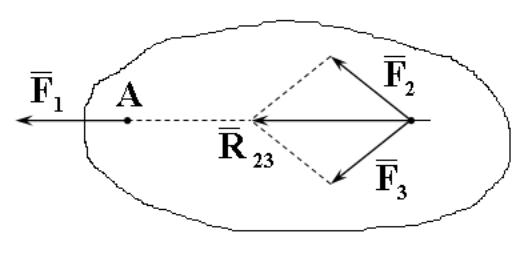
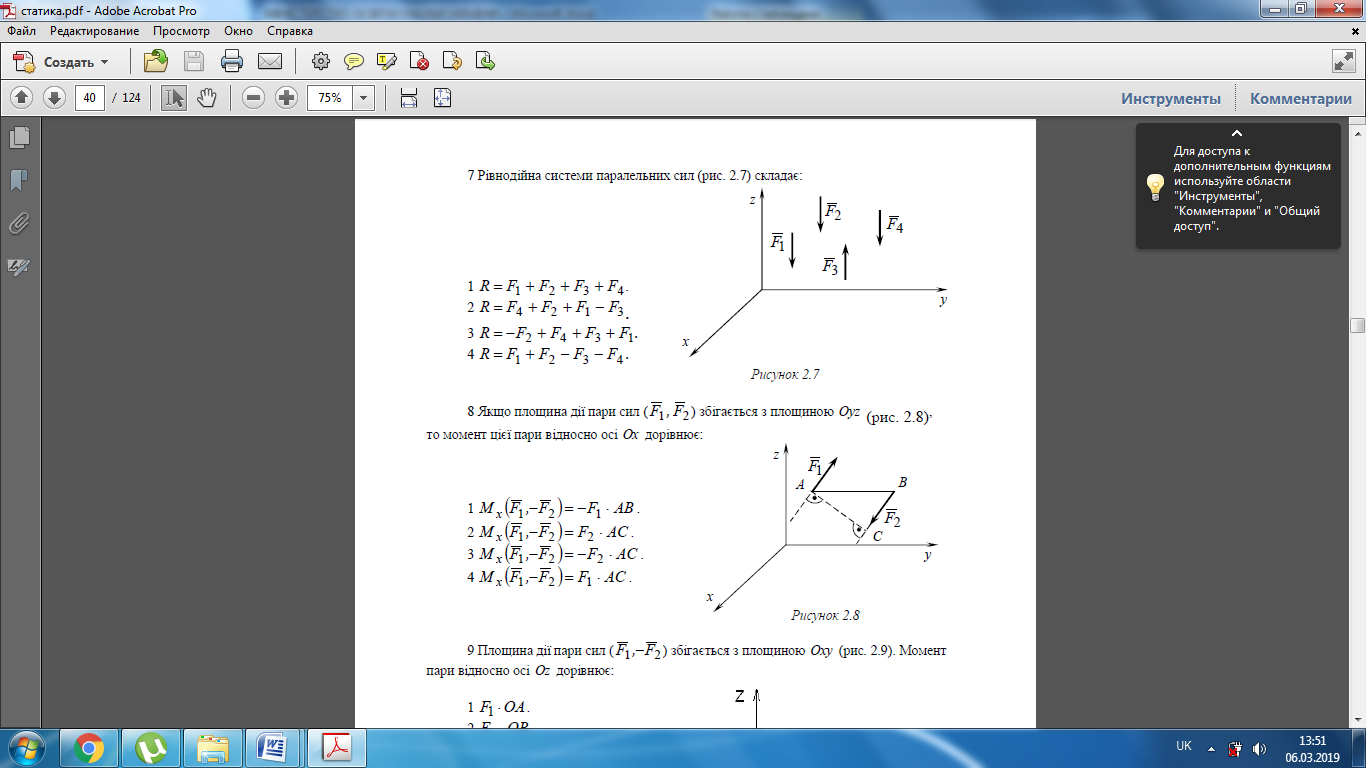
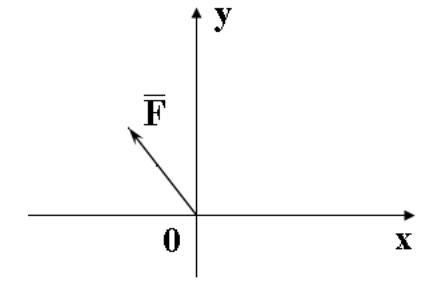
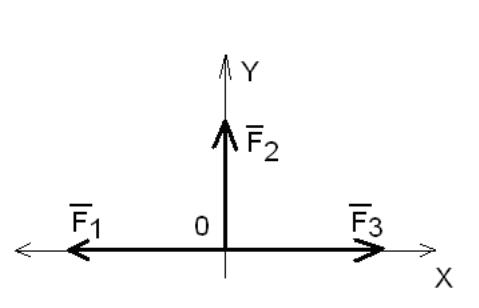
7. Модуль рівнодійної R системи двох сил, зображених на рисунку, визначається за формулами: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
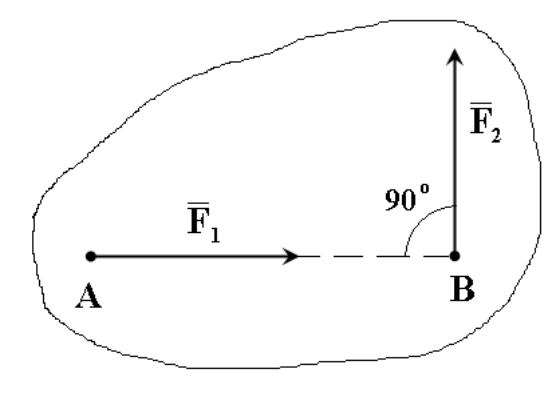
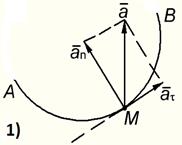
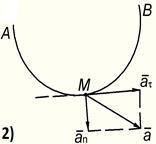
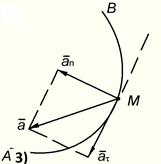
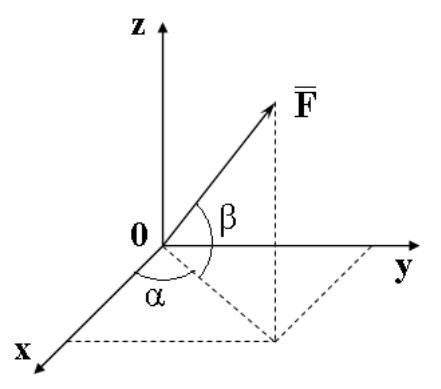
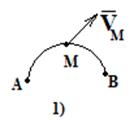
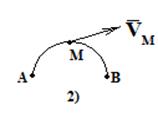
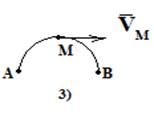
8. Зображені вектори відповідають умові | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
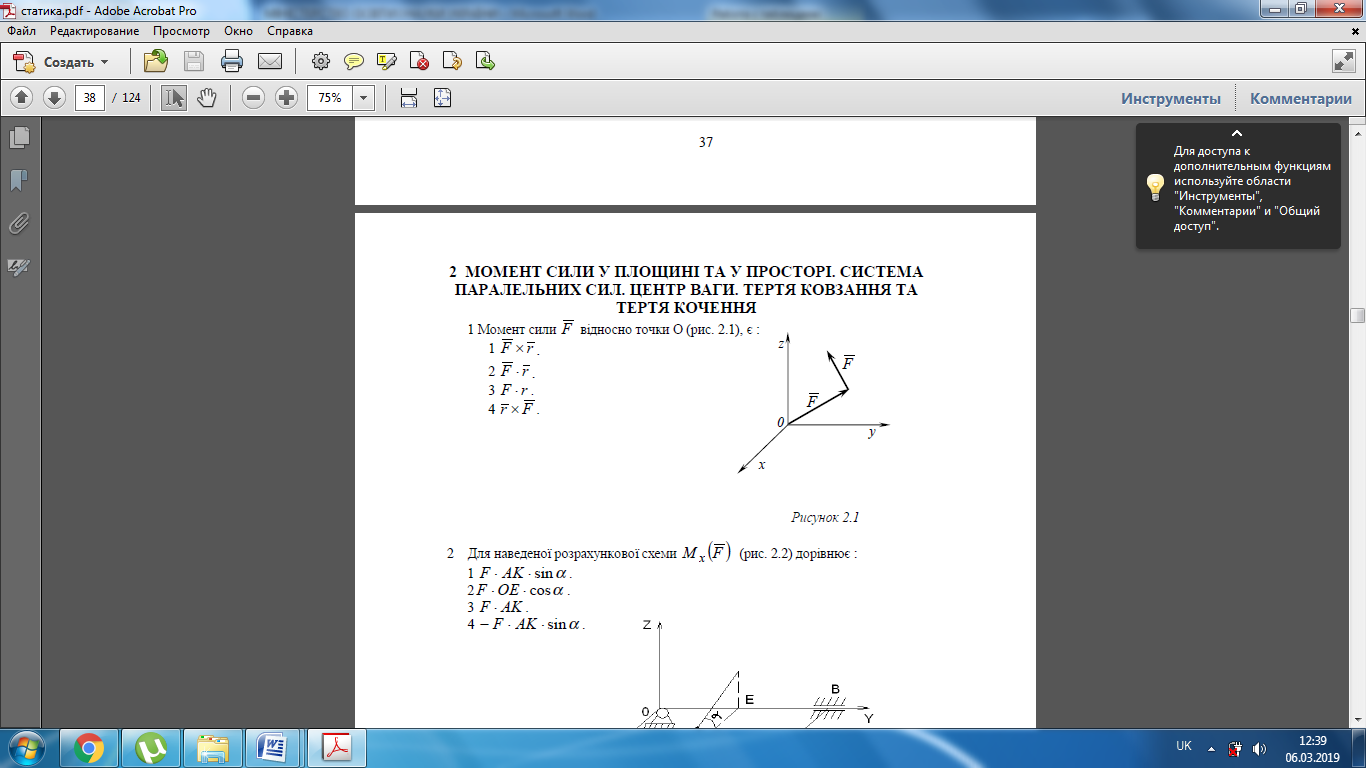
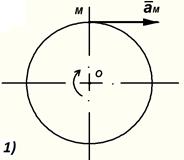
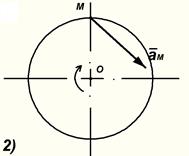
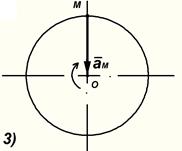
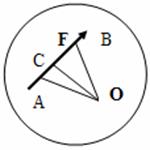
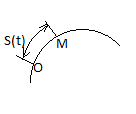
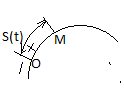
9. Момент сили F відносно точки О | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Якщо проекція сили | ||
| 1 | |
| 2 | |
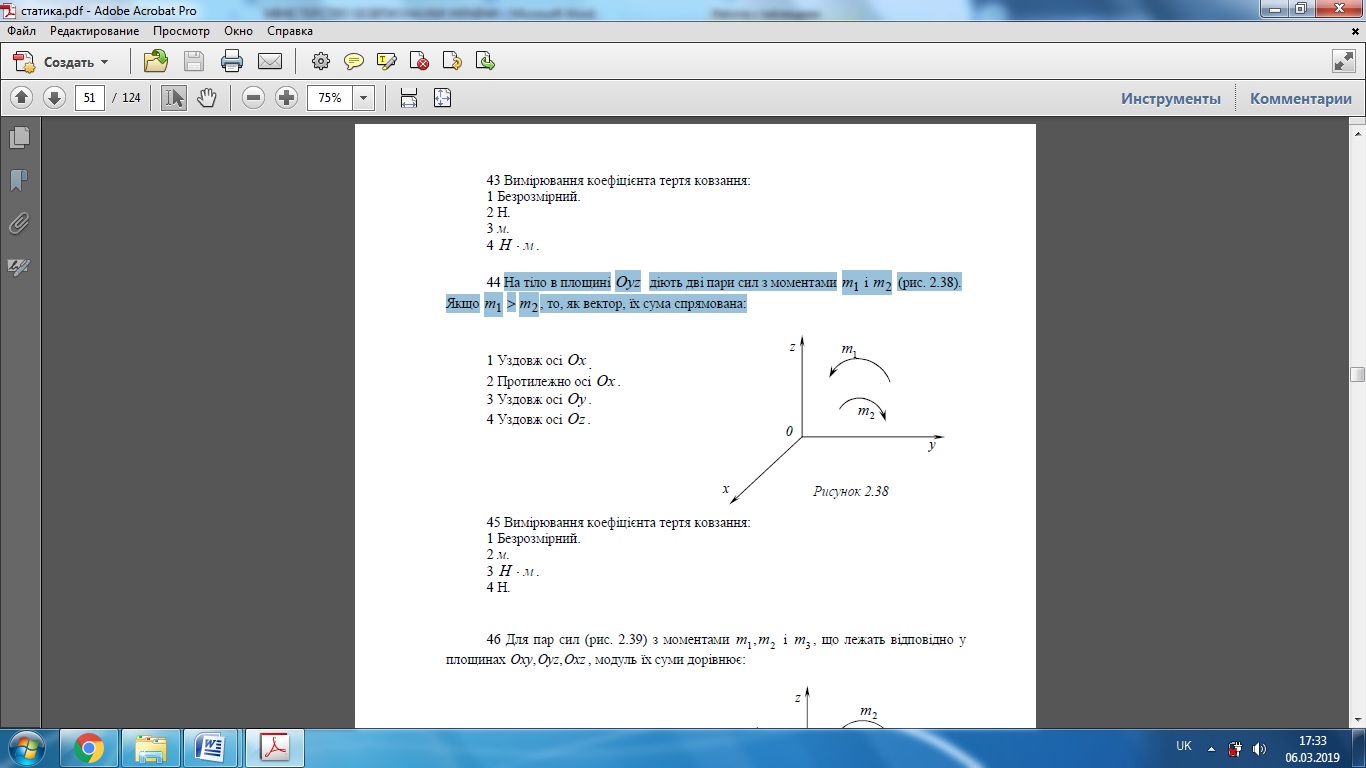
| 3 | |
| 4 | |
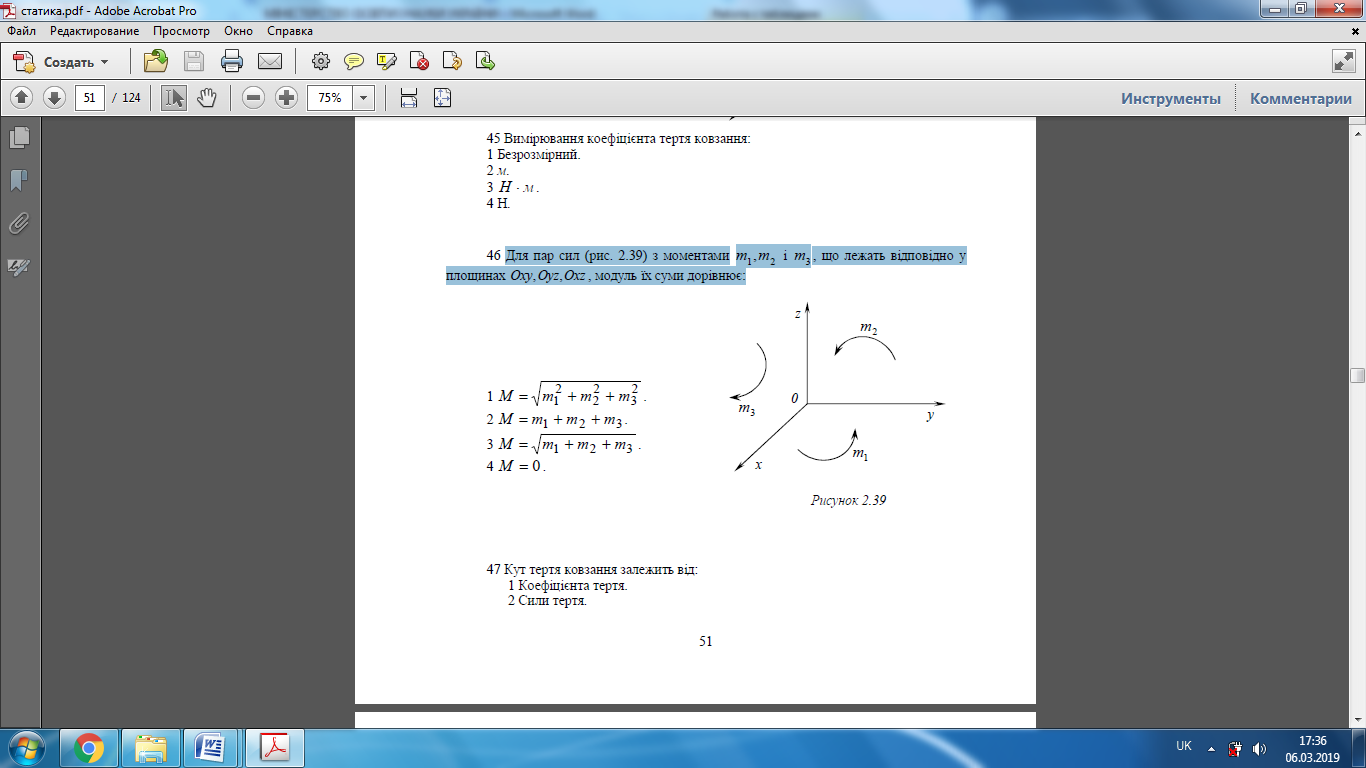
11. . До яких передач відносять пасові передачі? | ||
| 1 | передача тертям з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
12. Переріз клинового паса вибирають в залежності від: | ||
| 1 | передаваної потужності та очікуваної швидкості паса |
| 2 | передаваної колової сили та очікуваної швидкості паса |
| 3 | передаваного крутного моменту та очікуваної швидкості паса |
13. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
14. Потужність характеризує : | ||
| 1 | швидкість руху точки; |
| 2 | швидкість виконання роботи; |
| 3 | зміну траєкторії руху. |
15. Кінетична енергія точки дорівнює: | ||
| 1 | mgh |
| 2 | |
| 3 | Fh |
16. Які деформації не допустимі при нормальній роботі конструкції | ||
| 1 | жорсткі; |
| 2 | пластичні; |
| 3 | пружні. |
17. Напруги, які забезпечують безпечну роботу конструкції називаються: | ||
| 1 | граничними; |
| 2 | розрахунковими; |
| 3 | допустимими. |
18. До яких граничних напруг, які є механічними характеристиками матеріалу, можна навантажувати брус до появи пластичних деформацій: | ||
| 1 | границя пружності; |
| 2 | границя текучості; |
| 3 | границя пропорційності; |
| 4 | границя міцності. |
19. Як записати закон Гука при розтягу | ||
| 1 | |
| 2 | |
| 3 | |
20. В якому із варіантів брус буде міцний, якщо допустимі напруги для матеріалу з якого він виготовлений 140 МПа. Розрахункові напруги. | ||
| 1 | 150 МПа ; |
| 2 | 160 МПа ; |
| 3 | 120МПа. |
21. Які передачі вивчаються у курсі «Деталі машин»? | ||
| 1 | пневматичні |
| 2 | механічні |
| 3 | гідравлічній |
22. Перевірний розрахунок ланцюгових передач виконують за: | ||
| 1 | напруженнями зрізання у шарнірах ланцюга |
| 2 | напруженнями зминання у шарнірах ланцюга |
| 3 | середнім тиском у шарнірах ланцюга |
23. Підшипники, які сприймають осьові навантаження називаються: | ||
| 1 | упорними |
| 2 | радіальними |
| 3 | радіально-упорними |
24. Що означають у маркуванні підшипника кочення дві останні цифри 12: | ||
| 1 | діаметр внутрішнього кільця підшипника 120 мм |
| 2 | діаметр внутрішнього кільця підшипника 60 мм |
| 3 | діаметр зовнішнього кільця підшипника 60 мм |







МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №02 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія» Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Точка рухається по прямій з постійним прискоренням, направленим протилежно швидкості. Визначити як рухається точка: | ||
| 1 | рівномірно; |
| 2 | рівноприскорено; |
| 3 | рівносповільнено. |
2. Бистроту зміни кутової швидкості характеризує: | ||
| 1 | частота обертання; |
| 2 | кут повороту; |
| 3 | кутове прискорення. |
3. За якою формулою визначається лінійна швидкість точок тіла, яке обертається | ||
| 1 | |
| 2 | |
| 3 | |
4. Частота обертання точки 100 об/хв, якою буде її кутова швидкість: | ||
| 1 | |
| 2 | |
| 3 | |
5. Якими будуть шлях пройдений точкою, її швидкість і прискорення в момент часу t = 2 с, якщо вона рухається за законом S = 5t + 1 | ||
| 1 | |
| 2 | |
| 3 | |
6. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
7. Рівнодійна сила – це | ||
| 1 | сила, яка еквівалентна деякій системі сил; |
| 2 | сила, яка еквівалентна двом системам сил; |
| 3 | сила, яка еквівалентна взаємодії двох тіл. |
8. Момент пари сил дорівнює 80 Н·м, плече пари 0,2 м. Сили пари будуть дорівнювати: | ||
| 1 | 400 Н; |
| 2 | 160 Н; |
| 3 | 40 Н; |
| 4 | 80 Н. |
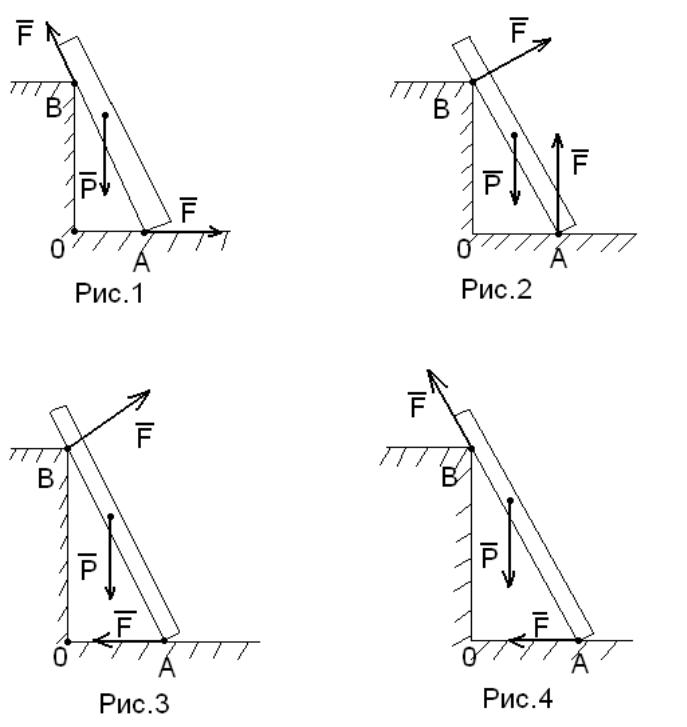
9. Умову рівноваги сил ілюструють рисунки | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Сили дії та протидії: | ||
| 1 | Рівні за модулем і мають один напрям. |
| 2 | Рівні за модулем і мають протилежний напрям. |
| 3 | Різні за модулем і мають один напрям. |
| 4 | Різні за модулем і мають протилежний напрям. |
11. До яких передач відносять ланцюгові передачі? | ||
| 1 | передача зачепленням з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
12. Ланцюги, які застосовують у ланцюгових передачах називаються: | ||
| 1 | тяговими |
| 2 | вантажними |
| 3 | приводними |
13. Сила інерції визначається за формулою: | ||
| 1 | G=mg |
| 2 | F=ma |
| 3 | F=-ma |
14. Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
15. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
16. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає поздовжня сила N | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
17. Напруги, які виникають в деталі, рівні 160 МПа, а граничні напруги для матеріалу деталі | ||
| 1 | 0,5; |
| 2 | 2; |
| 3 | 2,5. |
18. Зразки із сталі і дерева з однаковою площею поперечного переріза розтягуються однаковими силами. Чи будуть однаковими напруги які виникають в зразках | ||
| 1 | в стальному зразку виникнуть більші напруги, чим в дерев’яному; |
| 2 | в дерев’яному зразку виникнуть більші напруги, чим в стальному; |
| 3 | в зразках виникнуть однакові напруги. |
19. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає тільки поперечна сила Q | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
20. Чи впливає форма поперечного перерізу, при інших однакових умовах (однакові площа перерізу, матеріал, навантаження), на міцність бруса при розтягу | ||
| 1 | впливає |
| 2 | Не впливає |
21. Як визначити загальний ККД механічного приводу? | ||
| 1 | ηзаг= η1+η2+…+ ηп |
| 2 | ηзаг= η1·η2·…· ηп |
| 3 | ηзаг= η1-η2-…- ηп |
22. За якою формулою визначається передаточне число механічних передач? | ||
| 1 | u=d2/ω1 |
| 2 | u= ω2/d1 |
| 3 | u= ω1/ω2 |
23. Умова працездатності фрикційної передачі: | ||
| 1 | сила тертя у місці контакту котків повинна бути меншою за колову силу, що передається |
| 2 | сила тертя у місці контакту котків повинна бути більшою за силу притискання цих котків |
| 3 | сила тертя у місці контакту котків повинна бути більшою за колову силу, що передається |
24. Ведучою ланкою у черв’ячної передачі є: | ||
| 1 | черв’ячне колесо |
| 2 | черв’ячне колесо і черв’як |
| 3 | черв’як |

















МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №04 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія» Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Які елементи визначають рух точки при векторному способі задання її руху? | ||
| 1 | годограф радіус-вектора; |
| 2 | радіус-вектор, проведений з нерухомого центра О в дану точку; |
| 3 | траєкторія точки, рівняння руху |
2. Вкажіть правильну формулу швидкості при векторному способі задання руху | ||
| 1 | |
| 2 | |
| 3 | |
3. Яка формула визначає величину прискорення точки в криволінійному русі? | ||
| 1 | |
| 2 | |
| 3 | |
4. Вкажіть правильну формулу вектора кривизни кривої | ||
| 1 | |
| 2 | |
| 3 | |
5. Модуль швидкості точки при координатному способі задання її руху визначається виразом: | ||
| 1 | |
| 2 | |
| 3 | |
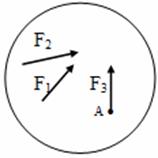
6. Головний вектор системи сил (F1 ,F2 ,F3 ), якщо F1 = F2 = F3 = F , дорівнює: | ||
| 1 | R=F |
| 2 | R=2F |
| 3 | R= –2F |
| 4 | R=3F |
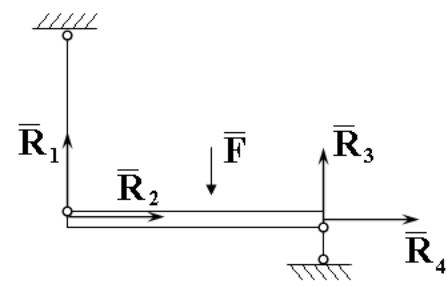
7. В якій послідовності розв’язуються задачі на рівновагу плоскої системи сил? | ||
| 1 | скласти рівняння рівноваги, розв’язати, позначити сили реакції зв’язків; |
| 2 | замінити зв’язки силами їх реакцій, скласти рівняння рівноваги, розв’язати; |
| 3 | скласти рівняння рівноваги, накреслити схему сил. |
8. Момент сили відносно точки О дорівнює : | ||
| 1 | добутку сили на косинус кута між силою і вісю; |
| 2 | добутку сили на відстань від точки прикладання сили до точки О; |
| 3 | добутку сили на плече. |
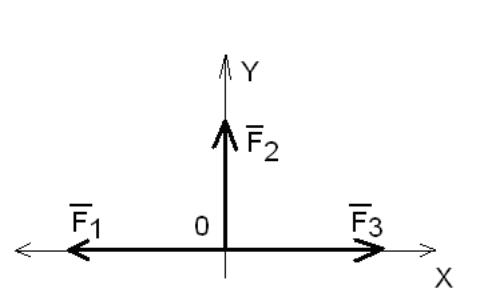
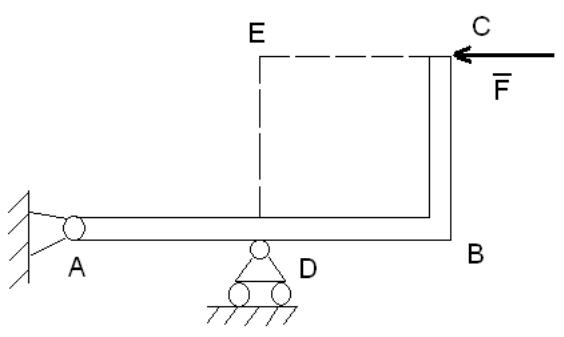
9. Лінія дії реакції гладенького ребра (точка В), на яке спирається балка, утворює з віссю Ох кут: | ||
| 1 | 30º |
| 2 | 120 º |
| 3 | 60 º |
| 4 | 90 º |
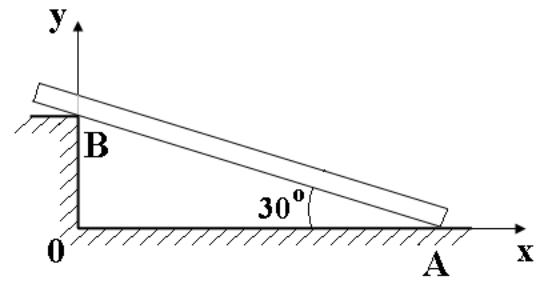
10. Проекція на вісь Оу сили F , зображеної на рисунку, дорівнює: | ||
| 1 | Fy = F cosa × cos b ; |
| 2 | Fy = F cosa × sin b ; |
| 3 | Fy = F sin a × sin b ; |
| 4 | Fy = F sin a × cos b . |
11. До яких передач відносять фрикційні передачі? | ||
| 1 | передача тертям з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
12. Перевірний розрахунок ланцюгових передач виконують за: | ||
| 1 | напруженнями зрізання у шарнірах ланцюга |
| 2 | напруженнями зминання у шарнірах ланцюга |
| 3 | середнім тиском у шарнірах ланцюга |
13. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
14. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v = 2,5 м/с. | ||
| 1 | 4 Вт; |
| 2 | 25 Вт; |
| 3 | 0,25 Вт. |
15. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
16. На ділянках балки вільних від рівномірно–розподільного навантаження епюра згинаючих моментів | ||
| 1 | пряма паралельна осі балки; |
| 2 | похила пряма; |
| 3 | квадратна парабола. |
17. Як записується умова міцності при згині | ||
| 1 | |
| 2 | |
| 3 | |
18. . В якій точці поперечного переріза бруса, який працює на згин, виникають максимальні нормальні напруги. | ||
| 1 | A |
| 2 | O |
| 3 | B |
19. Яка із форм поперечного переріза бруса, який працює на згин буде найменш раціональною | ||
| 1 | коло; |
| 2 | квадрат; |
| 3 | прямокутник; |
| 4 | двотавр. |
20. Які деформації не допустимі при нормальній роботі конструкції | ||
| 1 | жорсткі; |
| 2 | пластичні; |
| 3 | пружні. |
21. Ведучою ланкою у черв’ячної передачі є: | ||
| 1 | черв’ячне колесо |
| 2 | черв’ячне колесо і черв’як |
| 3 | черв’як |
22. Гвинти, які призначені для забезпечення точних переміщень та регулювань: | ||
| 1 | вантажні |
| 2 | ходові |
| 3 | встановлюючі |
23. Передача гвинт-гайка призначена для перетворення: | ||
| 1 | обертального руху в поступальний і навпаки |
| 2 | механічного руху в гідравлічний і навпаки |
| 3 | механічного руху в обертальний і навпаки |
24. Як визначити радіальну силу в зачепленні циліндричної прямозубої передачі? | ||
| 1 | Fr = Ft·cosα |
| 2 | Fr = Ft·tgα |
| 3 | Fr = Ft/cosα |



МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №05 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія» Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Нормальне прискорення точки характеризує: | ||
| 1 | зміну швидкості за величиною; |
| 2 | 2) зміну швидкості за величиною і за напрямком; |
| 3 | 3) зміну швидкості за напрямком. |
2. Яка формула визначає швидкість точки при натуральному способі задавання її руху? | ||
| 1 | |
| 2 | |
| 3 | |
3. За заданими рівняннями руху точки визначіть вигляд її траєкторії : | ||
| 1 | пряма; |
| 2 | коло; |
| 3 | еліпс. |
4. За якою формулою визначається вектор швидкості точки при натуральному способі задання руху і як він направлений? | ||
| 1 | |
| 2 | |
| 3 | |
5. Вкажіть закон руху точки при натуральному способі задання руху. | ||
| 1 | |
| 2 | |
| 3 | |
6. Статика це розділ теоретичної механіки, який вивчає : | ||
| 1 | рух тіла без урахування сил, які діють на нього; |
| 2 | умову рівноваги тіла під дією сил; |
| 3 | рух тіла з урахуванням сил, які діють на нього. |
7. Тіло знаходиться в рівновазі, якщо : | ||
| 1 | воно рухається з прискоренням; |
| 2 | воно рухається з постійною швидкістю; воно нерухоме; |
| 3 | воно рухається з доцентровим прискоренням. |
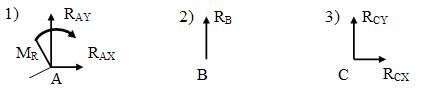
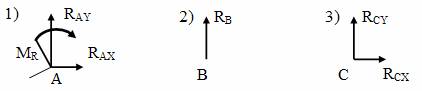
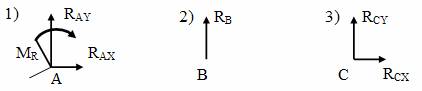
8. На якому малюнку показані складові сили реакції шарнірно нерухомої опори? | ||
| 1 | |
| 2 | |
| 3 | |
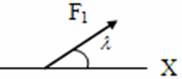
9. Проекція сили F1 на вісь х дорівнює | ||
| 1 | F1х=F1·cos |
| 2 | F1х=F1·sin |
| 3 | F1х=0 |
10. При якому значені кута | ||
| 1 | |
| 2 | |
| 3 | |
11. Умова працездатності фрикційної передачі: | ||
| 1 | сила тертя у місці контакту котків повинна бути меншою за колову силу, що передається |
| 2 | сила тертя у місці контакту котків повинна бути більшою за силу притискання цих котків |
| 3 | сила тертя у місці контакту котків повинна бути більшою за колову силу, що передається |
12. Деталь, яка призначена для передачі крутного моменту називається: | ||
| 1 | віссю |
| 2 | підшипником |
| 3 | валом |
13. Робота сили вимірюється в: | ||
| 1 | Вт |
| 2 | Дж |
| 3 | Па |
14. Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
15. Коефіцієнт корисної дії – це відношення: | ||
| 1 | корисної роботи до всієї затраченої роботи; |
| 2 | затраченої роботи до корисної роботи; |
| 3 | потужності до роботи. |
16. Напруги, які забезпечують безпечну роботу конструкції називаються: | ||
| 1 | граничними; |
| 2 | розрахунковими; |
| 3 | допустимими. |
17. До яких граничних напруг, які є механічними характеристиками матеріалу, можна навантажувати брус до появи пластичних деформацій: | ||
| 1 | границя пружності; |
| 2 | границя текучості; |
| 3 | границя пропорційності; |
| 4 | границя міцності |
18. Як записати закон Гука при розтягу | ||
| 1 | |
| 2 | |
| 3 | |
19. В якому із варіантів брус буде міцний, якщо допустимі напруги для матеріалу з якого він виготовлений 140 МПа. Розрахункові напруги. | ||
| 1 | 150 МПа ; |
| 2 | 160 МПа ; |
| 3 | 120МПа. |
20. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає поздовжня сила N | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
21. Переріз клинового паса вибирають в залежності від | ||
| 1 | передаваної потужності та очікуваної швидкості паса |
| 2 | передаваної колової сили та очікуваної швидкості паса |
| 3 | передаваного крутного моменту та очікуваної швидкості паса |
22. Замість передач з кількома клиновими пасами застосовують: | ||
| 1 | плоскопасові передачі |
| 2 | передачі з поліклиновими пасами |
| 3 | круглопасові передачі |
23. Які одноступінчасті редуктори передають крутний момент між паралельними осями? | ||
| 1 | циліндричні |
| 2 | черв’ячні |
| 3 | конічні |
24. Стандарт передбачає такі види черв’ячних передач: | ||
| 1 | циліндричні і конічні |
| 2 | циліндричні і глобоїдні |
| 3 | прямозубі і косозубі |
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №06 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. За якою формулою визначається вектор швидкості? | ||
| 1 | 1) |
| 2 | |
| 3 | |
2. Як записати рівняння рівноприскореного руху точки в загальному випадку і вираз швидкості при цьому виді руху? | ||
| 1 | |
| 2 | |
| 3 | |
3. Вкажіть закон руху точки при координатному способі задавання руху | ||
| 1 | |
| 2 | |
| 3 | |
4. Рівняння годографа швидкості має вигляд: | ||
| 1 | |
| 2 | |
| 3 | |
5. За якою формулою визначаються вектори | ||
| 1 | |
| 2 | |
| 3 | |
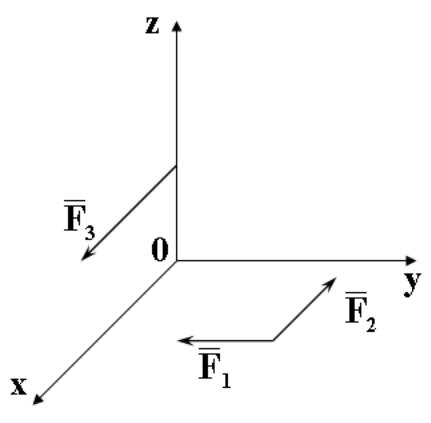
6. Проекція якої із сил на вісь Х дорівнює 0? | ||
| 1 | F1 |
| 2 | F2 |
| 3 | F3 |
7. На якому малюнку зображена пара сил | ||
| 1 | |
| 2 | |
| 3 | |
8. Проекція пари сил на вісь дорівнює : | ||
| 1 | проекції однієї із сил пари; |
| 2 | 0; |
| 3 | сумі сил пари. |
9. Момент пари сил дорівнює 80 Н·м, плече пари 0,2 м. Сили пари будуть дорівнювати: | ||
| 1 | 400 Н; |
| 2 | 160 Н; |
| 3 | 40 Н; |
| 4 | 80 Н. |
10. При якому значені М3 тіло під дією системи трьох пар сил буде знаходитись в рівновазі, якщо М1 = - 100 Н·м ; М2 = 40 Н·м | ||
| 1 | М3 = 0; |
| 2 | М3 = 60 Н·м; |
| 3 | М3 = - 60 Н·м. |
11. За якою формулою визначається передаточне число механічних передач? | ||
| 1 | u=d2/ω1 |
| 2 | u= ω2/d1 |
| 3 | u= ω1/ω2 |
12. Як визначити загальний ККД механічного приводу? | ||
| 1 | ηзаг= η1+η2+…+ ηп |
| 2 | ηзаг= η1·η2·…· ηп |
| 3 | ηзаг= η1-η2-…- ηп |
13. Вали розраховують на: | ||
| 1 | міцність і стійкість |
| 2 | міцність і жорсткість |
| 3 | стійкість і жорсткість |
14. Робота сили вимірюється в: | ||
| 1 | Вт ; |
| 2 | Дж ; |
| 3 | Па. |
15. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v = 2,5 м/с. | ||
| 1 | 4 Вт; |
| 2 | 25 Вт; |
| 3 | 0,25 Вт. |
16. Напруги, які виникають в деталі, рівні 160 МПа, а граничні напруги для матеріалу деталі | ||
| 1 | 0,5; |
| 2 | 2; |
| 3 | 2,5. |
17. Зразки із сталі і дерева з однаковою площею поперечного переріза розтягуються однаковими силами. Чи будуть однаковими напруги які виникають в зразках | ||
| 1 | в стальному зразку виникнуть більші напруги, чим в дерев’яному; |
| 2 | в дерев’яному зразку виникнуть більші напруги, чим в стальному; |
| 3 | в зразках виникнуть однакові напруги. |
18. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає тільки поперечна сила Q | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
19. Чи впливає форма поперечного перерізу, при інших однакових умовах (однакові площа перерізу, матеріал, навантаження), на міцність бруса при розтягу | ||
| 1 | Не впливає; |
| 2 | Впливає. |
20. Діаметр вала визначений із умови міцності 50 мм, із умови жорсткості 40 мм, який діаметр вала необхідно остаточно прийняти, щоб задовольняв обом умовам | ||
| 1 | 50 мм; |
| 2 | 45мм; |
| 3 | 40 мм |
21. Деталь, яка призначена для передачі крутного моменту називається: | ||
| 1 | віссю |
| 2 | підшипником |
| 3 | валом |
22. Перевірний розрахунок ланцюгових передач виконують за: | ||
| 1 | напруженнями зрізання у шарнірах ланцюга |
| 2 | напруженнями зминання у шарнірах ланцюга |
| 3 | середнім тиском у шарнірах ланцюга |
23. Основним критерієм роботоздатності ланцюгів є: | ||
| 1 | стійкість проти зрізання їх шарнірів |
| 2 | стійкість проти спрацювання їх шарнірів |
| 3 | стійкість проти зминання їх шарнірів |
24. Ланцюги, які застосовують у ланцюгових передачах називаються: | ||
| 1 | тяговими |
| 2 | вантажними |
| 3 | приводними |

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №07 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Вкажіть закон рівноприскореного руху точки по криволінійній траєкторії | ||
| 1 | |
| 2 | |
| 3 | |
2. Що характеризує дотичне і нормальне прискорення точки? | ||
| 1 | дотичне прискорення характеризує зміну швидкості за величиною, а нормальне за напрямком; |
| 2 | дотичне прискорення характеризує зміну швидкості за напрямком, а нормальне за величиною; |
| 3 | дотичне і нормальне прискорення характеризують зміну швидкості за одиницю часу. |
3. В якому випадку рух точки буде прискореним? | ||
| 1 | |
| 2 | |
| 3 | При прямолінійному русі. |
4. По якій траєкторії рухається точка, якщо задані рівняння її руху? | ||
| 1 | коло радіусом a, із центром на початку координат |
| 2 | еліпс із піввісями а, n |
| 3 | коло радіусом а, із центром в точці (a |
5. Як правильно записати рівняння годографа швидкості точки? | ||
| 1 | |
| 2 | |
| 3 | |
6. Момент сили відносно точки О дорівнює : | ||
| 1 | добутку сили на косинус кута між силою і вісю; |
| 2 | добутку сили на відстань від точки прикладання сили до точки О; |
| 3 | добутку сили на плече. |
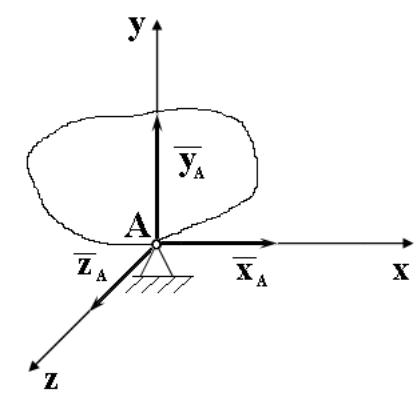
7. Тіло знаходиться у рівновазі під дією трьох сил F1 , F2 , F3 , дві з яких F1 і F 2 знаходяться у площині Оху. Тоді сила F3 не може бути напрямлена вздовж осі Ох, тому що це суперечить: | ||
| 1 | Аксіомі про дві сили. |
| 2 | Аксіомі про паралелограм сил. |
| 3 | Теоремі про перенос сили вздовж лінії дії. |
| 4 | Теореми про три сили. |
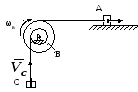
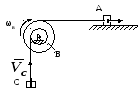
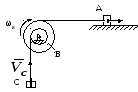
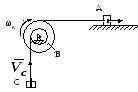
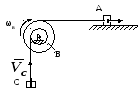
8. Вказати правильну відповідь.Якщо механічна система складається із вантажівА масою mА = 8 кг та С масою mС = 4 кг і ступінчастого диску В з радіусом інерції ρВ= 0,3 м (RВ = 0,4 м; rВ = 0,2 м) і м | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
9. Реакціям в’язей, які необхідно ввести для складання умов рівноваги балки, відповідають вектори: | ||
| 1 | XA, YA, XB, YB |
| 2 | XA, YA, XB |
| 3 | XA, YA, YB |
| 4 | XA, XB , YB |
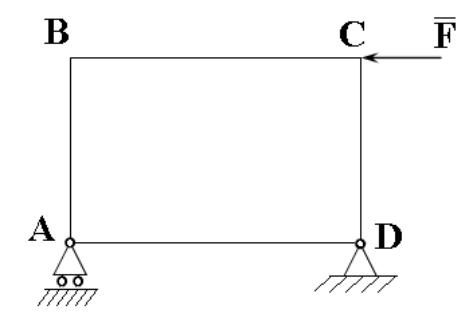
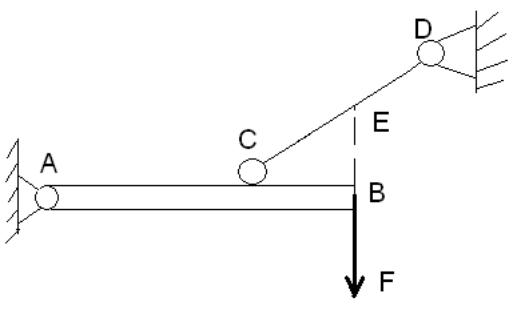
10. Невагома прямокутна пластина знаходиться в стані рівноваги. Лінія дії реакції шарніра D збігається з прямою: | ||
| 1 | DA. |
| 2 | DB. |
| 3 | DC. |
| 4 | АВ. |
11. За якою формулою визначається міжосьова відстань зубчастих передач? | ||
| 1 | аw =(d1+ d2)/2 |
| 2 | аw =(d2- d1)/2 |
| 3 | аw =2/(d1+ d2) |
12. Підшипники, які сприймають осьові навантаження називаються: | ||
| 1 | упорними |
| 2 | радіальними |
| 3 | радіально-упорними |
13. Кінетична енергія точки дорівнює: | ||
| 1 | mgh |
| 2 | |
| 3 | Fh |
14. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
15. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
16. Яку мінімально допустиму кутову швидкість може передати вал, якщо по розрахункам із умови міцності | ||
| 1 | |
| 2 | |
| 3 | |
17. Як записується умова жорсткості при кручені | ||
| 1 | |
| 2 | |
| 3 | |
18. Яку максимально допустиму потужність може передати вал, якщо по розрахункам: із умови міцності Р = 30 кВт, із умови жорсткості Р = 20кВт. | ||
| 1 | Р = 30кВт; |
| 2 | Р = 25кВт; |
| 3 | Р = 20кВт. |
19. На ділянках балки вільних від рівномірно–розподільного навантаження епюра згинаючих моментів | ||
| 1 | пряма паралельна осі балки; |
| 2 | похила пряма; |
| 3 | квадратна парабола. |
20. Як записується умова міцності при згині | ||
| 1 | |
| 2 | |
| 3 | |
21. В маркуванні підшипника кочення тип підшипника позначено цифрою 7: | ||
| 1 | шарикопідшипник радіальний |
| 2 | роликопідшипник радіально-упорний з конічними роликами |
| 3 | роликопідшипник радіальний з короткими циліндричними роликами |
22. В маркуванні підшипника кочення серія позначена цифрою 2: | ||
| 1 | середня серія |
| 2 | важка серія |
| 3 | легка серія |
23. Підшипники, які сприймають осьові навантаження називаються: | ||
| 1 | упорними |
| 2 | радіальними |
| 3 | радіально-упорними |
24. Вали розраховують на: | ||
| 1 | міцність і стійкість |
| 2 | міцність і жорсткість |
| 3 | стійкість і жорсткість |
 асою
асою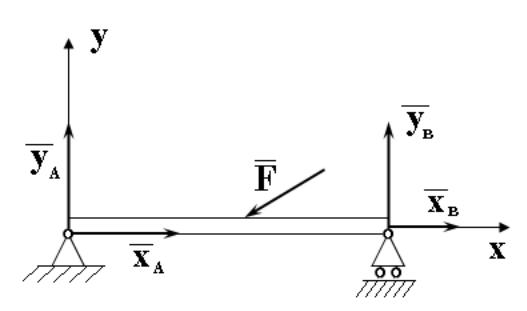












МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №08 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. За якою формулою слід визначати радіус кривизни траєкторії? | ||
| 1 | |
| 2 | |
| 3 | |
2. Щоб правильно задати рух точки натуральним способом, необхідно знати: | ||
| 1 | координати точки; траєкторію точки; |
| 2 | траєкторію точки; початок і напрямок відліку дугової координати; рівняння руху S=S(t); |
| 3 | |
3. Як визначається модуль вектора прискорення точки при координатному способі задання точки? | ||
| 1 | |
| 2 | |
| 3 | |
4. Яка формула визначає величину прискорення точки при переміщенні точки по криволінійній траєкторії? | ||
| 1 | а = |
| 2 | |
| 3 | |
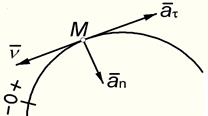
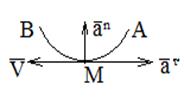
5. Як направленні вектори дотичного і нормального прискорення точки | ||
| 1 | |
| 2 | |
| 3 | |
6. Одиниці вимірювання момента сили | ||
| 1 | Дж; |
| 2 | Н·м; |
| 3 | Вт. |
7. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
8 | ||
| 1 | aА = 0,4 м/с2 |
| 2 | aА = 0,3 м/с2 |
| 3 | aА = 0,4 м/с2 |
| 4 | aА = 0,3 м/с2 |
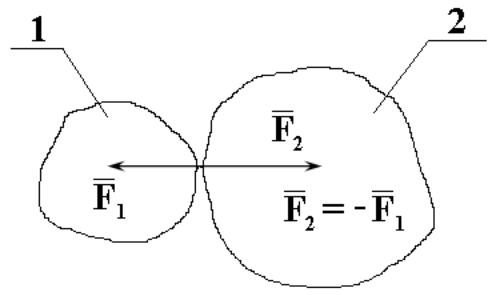
9. Наведений рисунок ілюструє | ||
| 1 | Аксіома про дві сили. |
| 2 | Аксіома рівності дії та протидії. |
| 3 | Теорема про перенос сили вздовж лінії дії. |
| 4 | Обидві вказані аксіоми. |
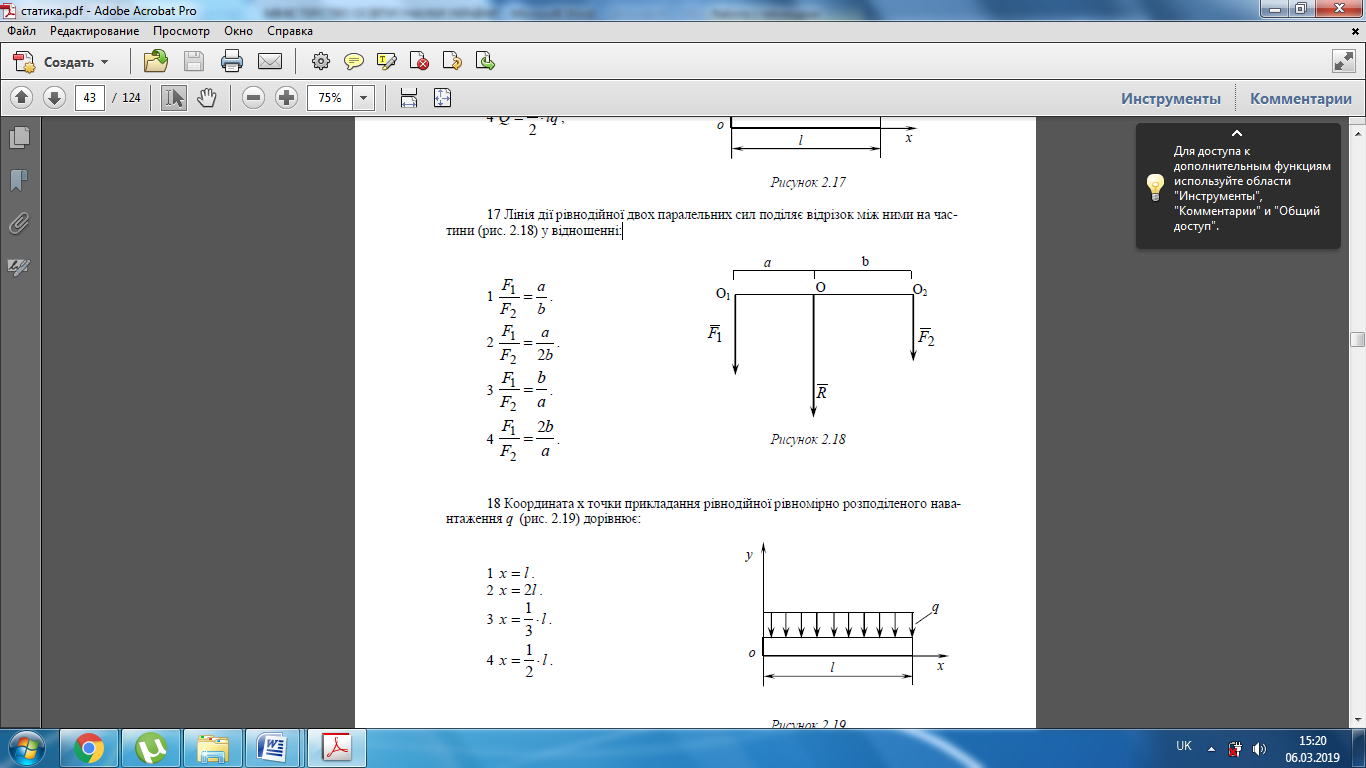
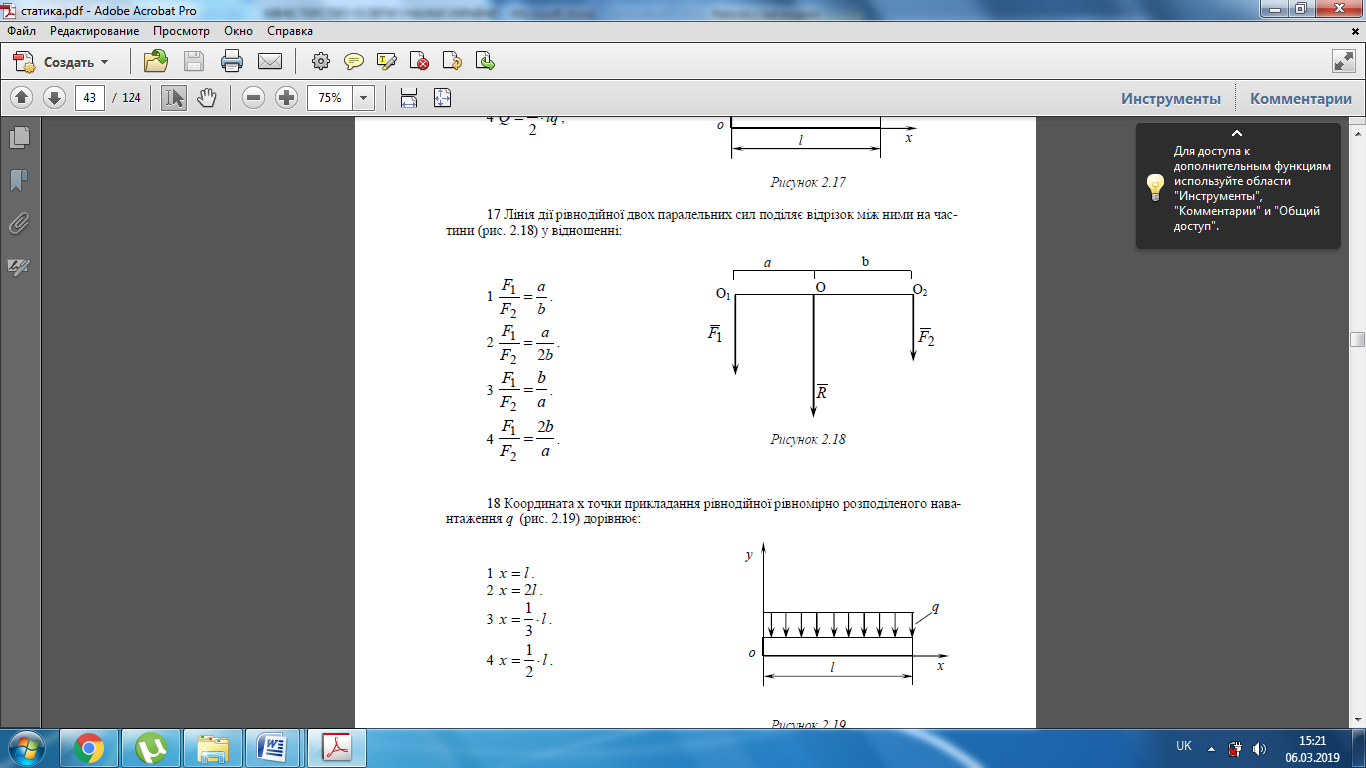
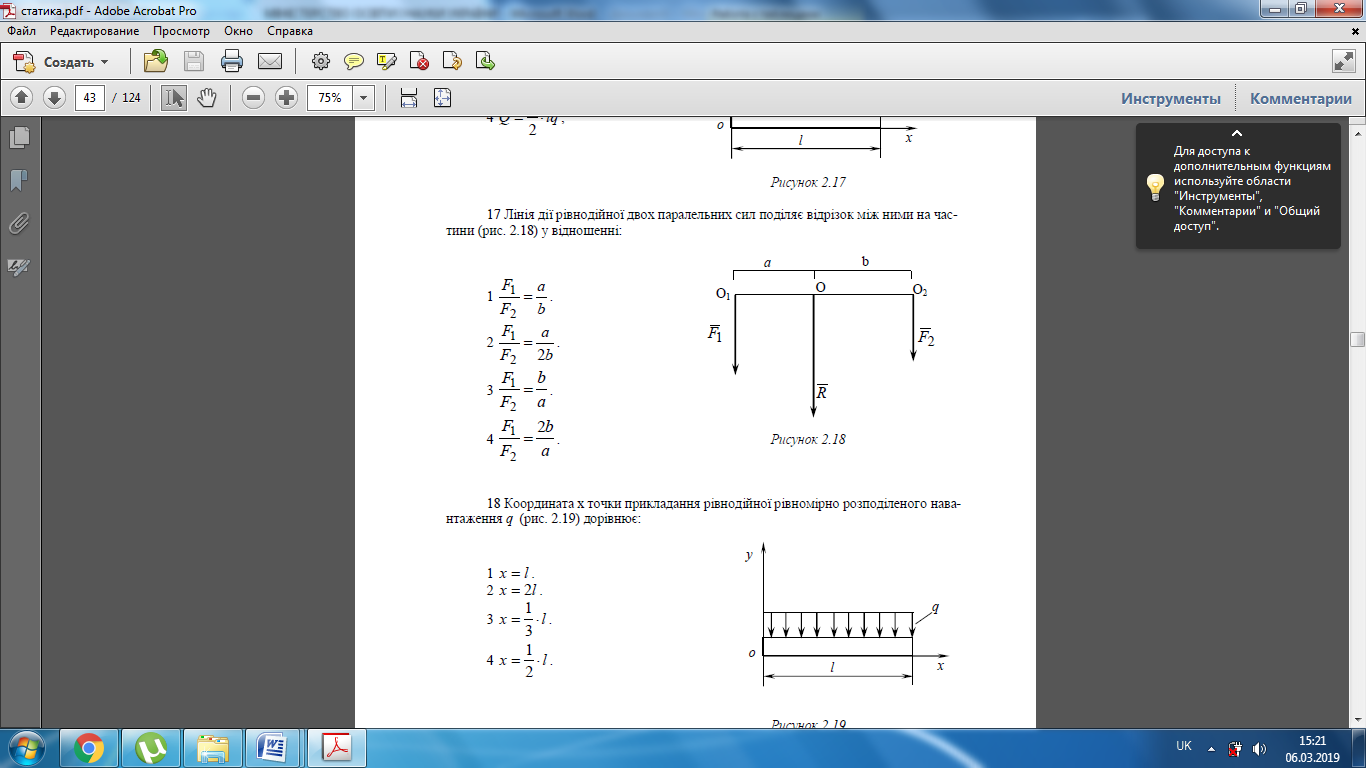
10. Лінія дії рівнодійної двох паралельних сил поділяє відрізок між ними на час- тини у відношенні: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
11. У яких циліндричних зубчастих передачах виникає осьова сила? | ||
| 1 | прямозубих |
| 2 | шевронних |
| 3 | косозубих |
12. В маркуванні підшипника кочення серія позначена цифрою 2: | ||
| 1 | середня серія |
| 2 | важка серія |
| 3 | легка серія |
13. Робота сили вимірюється в: | ||
| 1 | Вт ; |
| 2 | Дж ; |
| 3 | Па. |
14. Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
15. Потужність характеризує : | ||
| 1 | швидкість руху точки; |
| 2 | швидкість виконання роботи; |
| 3 | зміну траєкторії руху. |
16. В якій точці поперечного переріза бруса, який працює на згин, виникають максимальні нормальні напруги. | ||
| 1 | А |
| 2 | В |
| 3 | О |
17. Яка із форм поперечного переріза бруса, який працює на згин буде найменш раціональною | ||
| 1 | коло; |
| 2 | квадрат; |
| 3 | прямокутник; |
| 4 | двотавр |
18. Які деформації не допустимі при нормальній роботі конструкції | ||
| 1 | жорсткі; |
| 2 | пластичні; |
| 3 | пружні. |
19. Напруги, які забезпечують безпечну роботу конструкції називаються: | ||
| 1 | граничними; |
| 2 | розрахунковими; |
| 3 | допустимими. |
20. До яких граничних напруг, які є механічними характеристиками матеріалу, можна навантажувати брус до появи пластичних деформацій | ||
| 1 | границя пружності; |
| 2 | границя текучості; |
| 3 | границя пропорційності; |
| 4 | границя міцності. |
21. Розрахунок муфт виконують за: | ||
| 1 | розрахунковою потужністю |
| 2 | розрахунковою кутовою швидкістю |
| 3 | розрахунковим обертаючим моментом |
22. Муфти, які дають змогу з’єднувати і роз’єднувати вали як на ходу, так і під час зупинки: | ||
| 1 | самодіючі |
| 2 | керовані |
| 3 | некеровані |
23. Підшипники кочення підбирають за: | ||
| 1 | динамічною вантажопідйомністю |
| 2 | довговічністю |
| 3 | статичною вантажопідйомністю |
24. Що означають у маркуванні підшипника кочення дві останні цифри 12: | ||
| 1 | діаметр внутрішнього кільця підшипника 120 мм |
| 2 | діаметр внутрішнього кільця підшипника 60 мм |
| 3 | діаметр зовнішнього кільця підшипника 60 мм |
 .
.
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №09 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Згідно з якою формулою визначається вектор швидкості в натуральних координатах? | ||
| 1 | |
| 2 | |
| 3 | |
2. Який випадок відповідає нерівномірному прямолінійному русі тіла? | ||
| 1 | |
| 2 | |
| 3 | |
3. Як правильно задати рух точки координатним способом? | ||
| 1 | S=S(t); |
| 2 | |
| 3 | |
4. Вкажіть правильну формулу повного прискорення точки | ||
| 1 | а = |
| 2 | а = |
| 3 | |
5. Яка формула визначає швидкість точки при натуральному способі задання руху? | ||
| 1 | |
| 2 | |
| 3 | |
6. Момент сили F відносно точки О дорівнює: | ||
| 1 | |
| 2 | |
| 3 | |
7. Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб до- рівнювали нулю : | ||
| 1 | Головний вектор цієї системи. |
| 2 | Головний алгебраїчний момент відносно центра зведення. |
| 3 | Головний вектор цієї системи і її головний алгебраїчний момент відносно |
| 4 | центра зведення. |
8 | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
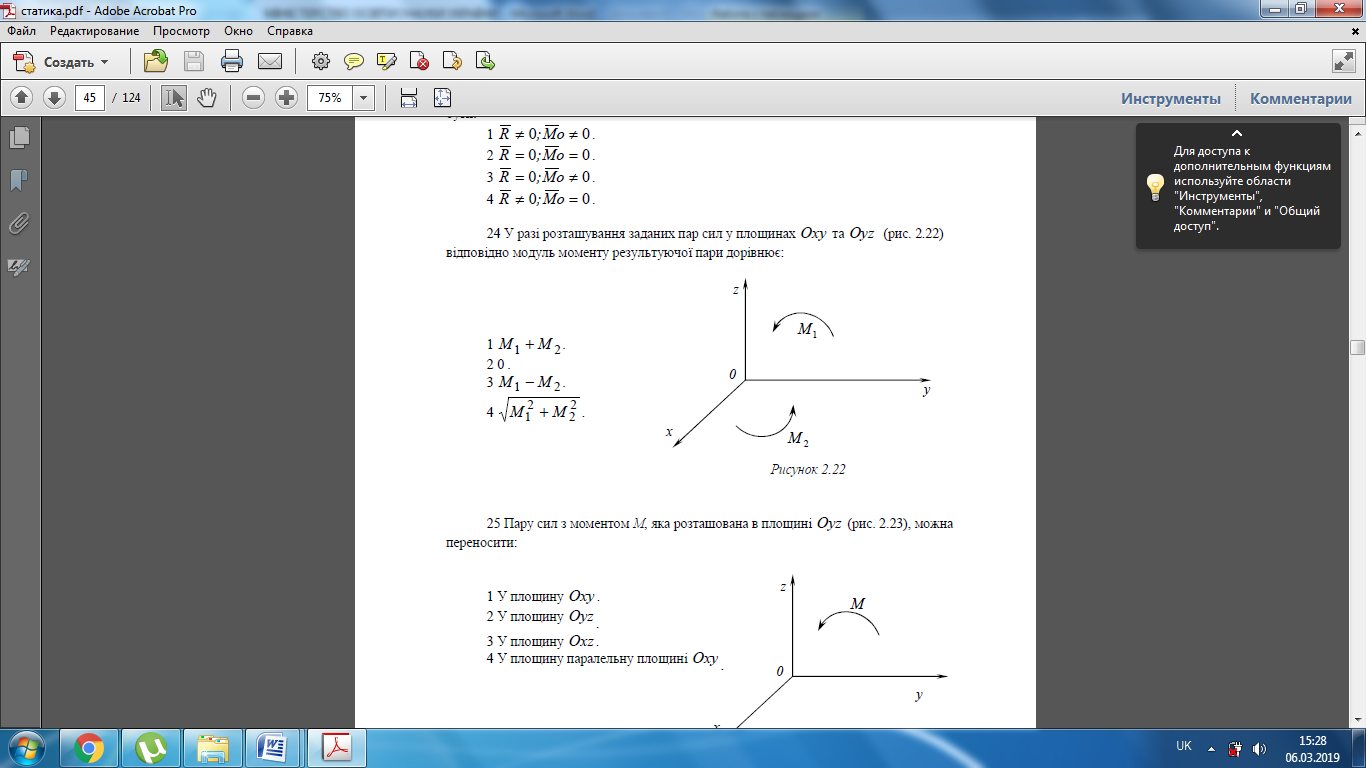
9. У разі розташування заданих пар сил у площинах Oxy та Oyz відповідно модуль моменту результуючої пари дорівнює: | ||
| 1 | M1 M2 . |
| 2 | 0 . |
| 3 | M1 M2 . |
| 4 | |
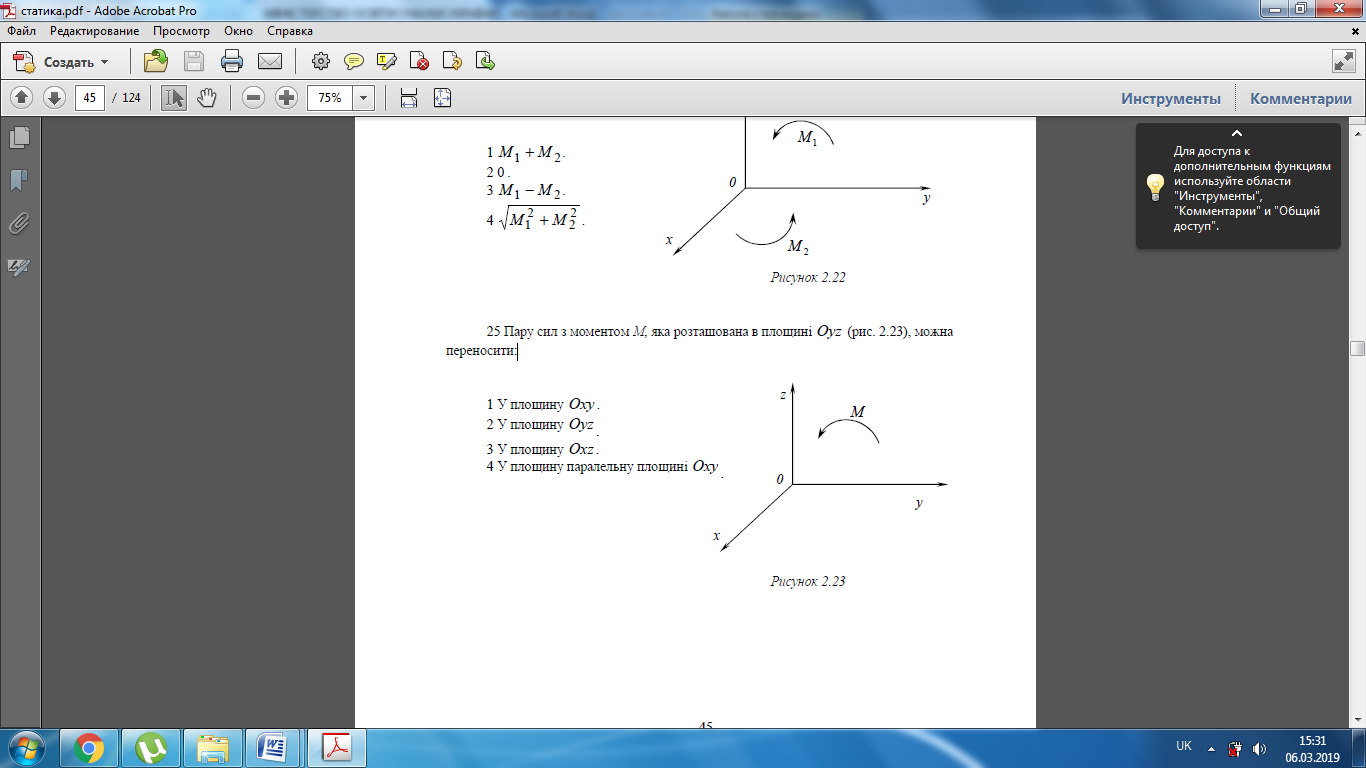
10. Пару сил з моментом М, яка розташована в площині Oyz, можна переносити: | ||
| 1 | У площину Oxy . |
| 2 | У площину Oyz . |
| 3 | У площину Oxz. |
| 4 | У площину паралельну площині Oxy . |
11. Як визначити колову силу в зачепленні циліндричної зубчастої передачі? | ||
| 1 | Ft =2T2/d2 |
| 2 | Ft =2D2/d2 |
| 3 | Ft =2T2/t2 |
12. В маркуванні підшипника кочення тип підшипника позначено цифрою 7: | ||
| 1 | шарикопідшипник радіальний |
| 2 | роликопідшипник радіально-упорний з конічними роликами |
| 3 | роликопідшипник радіальний з короткими циліндричними роликами |
13. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v= 2,5 м/с. | ||
| 1 | 4 Вт; |
| 2 | 25 Вт; |
| 3 | 0,25 Вт |
14. Коефіцієнт корисної дії – це відношення: | ||
| 1 | корисної роботи до всієї затраченої роботи; |
| 2 | затраченої роботи до корисної роботи; |
| 3 | потужності до роботи. |
15. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
16. Як записати закон Гука при розтягу | ||
| 1 | |
| 2 | |
| 3 | |
17. В якому із варіантів брус буде міцний, якщо допустимі напруги для матеріалу з якого він виготовлений 140 МПа. Розрахункові напруги. | ||
| 1 | 150 МПа ; |
| 2 | 160 МПа ; |
| 3 | 120МПа. |
18. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає поздовжня сила N | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
19. Напруги, які виникають в деталі, рівні 160 МПа, а граничні напруги для матеріалу деталі | ||
| 1 | 0,5; |
| 2 | 2; |
| 3 | 2,5. |
20. Зразки із сталі і дерева з однаковою площею поперечного переріза розтягуються однаковими силами. Чи будуть однаковими напруги які виникають в зразках | ||
| 1 | в стальному зразку виникнуть більші напруги, чим в дерев’яному; |
| 2 | в дерев’яному зразку виникнуть більші напруги, чим в стальному; |
| 3 | в зразках виникнуть однакові напруги. |
21. Які два типи шліцьових з’єднань стандартизовані? | ||
| 1 | з’єднання з трикутними шліцами і прямо бічні з’єднання |
| 2 | прямо бічні з’єднання і з’єднання з евольвентними шліцами |
| 3 | з’єднання з евольвентними шліцами і з’єднання з трикутними шліцами |
22. Які шпонки належать до ненапружених: | ||
| 1 | призматичні і сегментні |
| 2 | призматичні і клинові |
| 3 | сегментні і тангенціальні |
23. Який профіль різьби використовується для гвинтів домкратів: | ||
| 1 | дюймова |
| 2 | кругла |
| 3 | упорна |
24. До роз’ємних з’єднань належать: | ||
| 1 | різьбові, зварні, шпонкові |
| 2 | шпонкові, шліцьові, різьбові |
| 3 | шліцьові, заклепкові, зварні |
 .
.

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №10 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Які формули виражають рівняння траєкторії точки в векторній формі? | ||
| 1 | |
| 2 | |
| 3 | S=S(t). |
2. При якому способі задання руху точки може бути безпосередньо визначено направлення вектора швидкості відносно траєкторії? | ||
| 1 | при координатному способі; |
| 2 | при натуральному способі; |
| 3 | при векторному способі. |
3. Чи має місце рівняння | ||
| 1 | так; |
| 2 | ні; |
| 3 | має при натуральному способі задавання руху. |
4. Вкажіть правильне задання руху точки в натуральних координатах. | ||
| 1 | |
| 2 | |
| 3 | |
5. Яка формула визначає вектор швидкості точки в даний момент часу? | ||
| 1 | |
| 2 | |
| 3 | |
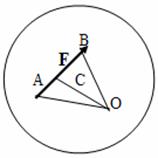
6. Який із відрізків можна назвати плечем сили F відносно точки О? | ||
| 1 | ОА; |
| 2 | ОВ; |
| 3 | ОС. |
7.Вказати правильну відповідь.Я | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
8 Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
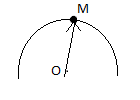
9. Якщо в механічній системі диск В обертається відповідно до закону φ = 0,5t2 − 0,2t (рад), а його радіус має значення R = 0,4 м, то в заданий момент часу t1 = 1 c прискорення тіла А і точки М диска становлять: | ||
| 1 | aА = 0,4 м/с2 |
| 2 | aА = 0,3 м/с2 |
| 3 | aА = 0,4 м/с2 |
| 4 | aА = 0,3 м/с2 |
10. У статично визначеній задачі кількість невідомих сил – n і кількість рівнянь рівноваги – m, до яких входять ці сили, задовольняють умову: | ||
| 1 | n < m. |
| 2 | n ≤ m. |
| 3 | n ≥ m. |
| 4 | n > m. |
11. Як визначити радіальну силу в зачепленні циліндричної прямозубої передачі? | ||
| 1 | Fr = Ft·cosα |
| 2 | Fr = Ft·tgα |
| 3 | Fr = Ft/cosα |
12. Що означають у маркуванні підшипника кочення дві останні цифри 12: | ||
| 1 | діаметр внутрішнього кільця підшипника 120 мм |
| 2 | діаметр внутрішнього кільця підшипника 60 мм |
| 3 | діаметр зовнішнього кільця підшипника 60 мм |
13. Потужність при обертальному русі визначається за формулою: | ||
| 1 | |
| 2 | |
| 3 | |
14. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
15. Робота сили вимірюється в: | ||
| 1 | Вт ; |
| 2 | Дж ; |
| 3 | Па. |
16. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає тільки поперечна сила Q | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
17. Чи впливає форма поперечного перерізу, при інших однакових умовах (однакові площа перерізу, матеріал, навантаження), на міцність бруса при розтягу | ||
| 1 | впливає; |
| 2 | не впливає. |
18. Як записується умова міцності при кручені | ||
| 1 | |
| 2 | |
| 3 | |
19. Діаметр вала визначений із умови міцності 50 мм, із умови жорсткості 40 мм, який діаметр вала необхідно остаточно прийняти, щоб задовольняв обом умовам | ||
| 1 | 50 мм; |
| 2 | 45мм; |
| 3 | 40 мм |
20. Яку мінімально допустиму кутову швидкість може передати вал, якщо по розрахункам із умови міцності | ||
| 1 | |
| 2 | |
| 3 | |
21. До яких передач відносять зубчасті передачі? | ||
| 1 | передача зачепленням з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
22. До яких передач відносять ланцюгові передачі? | ||
| 1 | передача зачепленням з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
23. До яких передач відносять пасові передачі? | ||
| 1 | передача тертям з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |
24. Які передачі вивчаються у курсі «Деталі машин»? | ||
| 1 | пневматичні |
| 2 | механічні |
| 3 | гідравлічній |
 кщо механічна система складається із вантажів
кщо механічна система складається із вантажів








МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №11 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Якщо протягом деякого часу виконується умова | ||
| 1 | криволінійно рівномірно; |
| 2 | прямолінійно рівномірно; |
| 3 | прямолінійно нерівномірно. |
2. Вкажіть рівняння руху точки в декартових координатах | ||
| 1 | |
| 2 | |
| 3 | |
3. Закон руху точки при натуральному способі задання руху визначається рівнянням | ||
| 1 | |
| 2 | S=S(t); |
| 3 | |
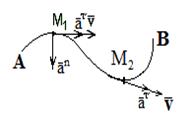
4. Який із наведених рисунків не відповідає дійсності, якщо точка М рухається прискорено по траєкторії від А до В? | ||
| 1 | |
| 2 | |
| 3 | |
5. Вкажіть правильне визначення дугової координати | ||
| 1 | шлях, пройдений точкою за час t; |
| 2 | відстань, відкладена по траєкторії точки від початку відліку до положення точки, що рухається, на кривій в момент часу t; |
| 3 | шлях, пройдений від початку відліку до моменту часу t. |
6. Момент якої сили відносно точки А дорівнює 0 | ||
| 1 | F1; |
| 2 | F2; |
| 3 | F3. |
7. Які із рівнянь відносяться до І форми рівнянь рівноваги плоскої системи сил? | ||
| 1 | |
| 2 | |
| 3 | |
8. Для рівнодійної системи збіжних сил ( F1, F2 , ... , Fn ), що діє на тверде тіло, виконується співвідношення: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
9. Реакціям в’язей, які необхідно ввести для складання умов рівноваги тіла у не- рухомому циліндричному шарнірі-підшипнику, відповідають вектори: | ||
| 1 | X A . |
| 2 | YA . |
| 3 | Z A . |
| 4 | X A , YA . |
10. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
11. Конічна передача відноситься до передач із: | ||
| 1 | паралельними осями |
| 2 | осями, що перетинаються |
| 3 | осями, що перехрещуються |
12. Підшипники кочення підбирають за | ||
| 1 | динамічною вантажопідйомністю |
| 2 | довговічністю |
| 3 | статичною вантажопідйомністю |
13. Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
14. Потужність характеризує : | ||
| 1 | швидкість руху точки; |
| 2 | швидкість виконання роботи; |
| 3 | зміну траєкторії руху. |
15. Як записується умова жорсткості при кручені | ||
| 1 | |
| 2 | |
| 3 | |
16. Яку максимально допустиму потужність може передати вал, якщо по розрахункам: із умови міцності Р = 30 кВт, із умови жорсткості Р = 20кВт. | ||
| 1 | Р = 30кВт; |
| 2 | Р = 25кВт; |
| 3 | Р = 20кВт. |
17. На ділянках балки вільних від рівномірно–розподільного навантаження епюра згинаючих моментів | ||
| 1 | пряма паралельна осі балки; |
| 2 | похила пряма; |
| 3 | квадратна парабола. |
18. Як записується умова міцності при згині | ||
| 1 | |
| 2 | |
| 3 | |
19. В якій точці поперечного переріза бруса, який працює на згин, виникають максимальні нормальні напруги. | ||
| 1 | А; |
| 2 | В; |
| 3 | О. |
20. Яка із форм поперечного переріза бруса, який працює на згин буде найменш раціональною | ||
| 1 | коло; |
| 2 | квадрат; |
| 3 | прямокутник; |
| 4 | двотавр. |
21. Як визначити загальний ККД механічного приводу? | ||
| 1 | ηзаг= η1+η2+…+ ηп |
| 2 | ηзаг= η1·η2·…· ηп |
| 3 | ηзаг= η1-η2-…- ηп |
22. За якою формулою визначається передаточне число механічних передач? | ||
| 1 | u=d2/ω1 |
| 2 | u= ω2/d1 |
| 3 | u= ω1/ω2 |
23. Умова працездатності фрикційної передачі: | ||
| 1 | сила тертя у місці контакту котків повинна бути меншою за колову силу, що передається |
| 2 | сила тертя у місці контакту котків повинна бути більшою за силу притискання цих котків |
| 3 | сила тертя у місці контакту котків повинна бути більшою за колову силу, що передається |
24. До яких передач відносять фрикційні передачі? | ||
| 1 | передача тертям з безпосереднім контактом |
| 2 | передача зачепленням з гнучким зв’язком |
| 3 | передача тертям з гнучким зв’язком |






МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №12 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Вектор швидкості точки в даний момент часу визначається формулою | ||
| 1 | |
| 2 | |
| 3 | |
2. Який фізичний зміст має дотичне прискорення точки? | ||
| 1 | характеризує зміну швидкості за величиною; |
| 2 | характеризує зміну швидкості за напрямком; |
| 3 | характеризує зміну швидкості за величиною і за напрямком. |
3. Які із наведених рівнянь визначають рух точки в площині | ||
| 1 | |
| 2 | |
| 3 | |
4. Дайте правильне продовження означення: Швидкістю точки в даний момент часу називається векторна величина, яка характеризує | ||
| 1 | швидкість і напрямок руху точки в даній системі відліку; |
| 2 | зміну шляху точки в часі; |
| 3 | переміщення точки по її траєкторії. |
5. Як напрямлено прискорення точки у випадку сповільненого прямолінійного руху точки? | ||
| 1 | вздовж траєкторії в сторону руху; |
| 2 | по нормалі до траєкторії; |
| 3 | вздовж траєкторії в протилежну сторону руху. |
6. Які із рівнянь відносяться до ІІ форми рівнянь рівноваги плоскої системи сил? | ||
| 1 | |
| 2 | |
| 3 | |
7. У статично невизначеній задачі кількість невідомих сил – n і кількість рівнянь рівноваги – m, до яких входять ці сили, задовольняють умову: | ||
| 1 | n < m. |
| 2 | n ≤ m. |
| 3 | n = m. |
| 4 | n > m. |
8. Зображеному рисунку відповідає: | ||
| 1 | Fx > 0, Fy > 0. |
| 2 | Fx < 0, Fy < 0. |
| 3 | Fx > 0, Fy < 0. |
| 4 | Fx < 0, Fy > 0. |
9. Матеріальна точка – це… | ||
| 1 | Тіло. Що не змінює своїх розмірів при русі |
| 2 | Тіло масою якого вданій задачі можна знехтувати |
| 3 | Тіло розмірами і формою якого можна знехтувати в даній задачі |
| 4 | Тіло розміри якого не відрізняються від розмірів інших тіл. Що розглядаються в даній задачі |
10. Система відліку – це сукупність | ||
| 1 | Тіла відліку і системи координат,жорстко зв’язаної з цим тілом |
| 2 | Тіла відліку і годинника |
| 3 | Тіла відліку, система координат, зв’язаної з цим тілом, і годинника |
| 4 | Тіла відліку і зв’язаної з ним системи координат, годинника і вказівки про початок відліку часу |
11. Передача гвинт-гайка призначена для перетворення: | ||
| 1 | обертального руху в поступальний і навпаки |
| 2 | механічного руху в гідравлічний і навпаки |
| 3 | механічного руху в обертальний і навпаки |
12. Муфти, які дають змогу з’єднувати і роз’єднувати вали як на ходу, так і під час зупинки: | ||
| 1 | самодіючі |
| 2 | керовані |
| 3 | некеровані |
13. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v = 2,5 м/с. | ||
| 1 | 4 Вт; |
| 2 | 25 Вт; |
| 3 | 0,25 Вт. |
14. Коефіцієнт корисної дії – це відношення: | ||
| 1 | корисної роботи до всієї затраченої роботи; |
| 2 | затраченої роботи до корисної роботи; |
| 3 | потужності до роботи. |
15. Кінетична енергія точки дорівнює: | ||
| 1 | mgh |
| 2 | |
| 3 | Fg |
16. Які деформації не допустимі при нормальній роботі конструкції | ||
| 1 | жорсткі; |
| 2 | пластичні; |
| 3 | пружні. |
| 4 | жорсткі; |
17. Напруги, які забезпечують безпечну роботу конструкції називаються: | ||
| 1 | граничними; |
| 2 | розрахунковими; |
| 3 | допустимими. |
| 4 | граничними; |
18. До яких граничних напруг, які є механічними характеристиками матеріалу, можна навантажувати брус до появи пластичних деформацій: | ||
| 1 | границя пружності; |
| 2 | границя текучості; |
| 3 | границя пропорційності; |
| 4 | границя міцності. |
19. Як записати закон Гука при розтягу | ||
| 1 | |
| 2 | |
| 3 | |
20. В якому із варіантів брус буде міцний, якщо допустимі напруги для матеріалу з якого він виготовлений 140 МПа. Розрахункові напруги. | ||
| 1 | 150 МПа ; |
| 2 | 160 МПа ; |
| 3 | 120МПа. |
21. Як визначити радіальну силу в зачепленні циліндричної прямозубої передачі? | ||
| 1 | Fr = Ft·cosα |
| 2 | Fr = Ft·tgα |
| 3 | Fr = Ft/cosα |
22. Як визначити колову силу в зачепленні циліндричної зубчастої передачі? | ||
| 1 | Ft =2T2/d2 |
| 2 | Ft =2D2/d2 |
| 3 | Ft =2T2/t2 |
23. У яких циліндричних зубчастих передачах виникає осьова сила? | ||
| 1 | прямозубих |
| 2 | шевронних |
| 3 | косозубих |
24. За якою формулою визначається міжосьова відстань зубчастих передач? | ||
| 1 | аw =(d1+ d2)/2 |
| 2 | аw =(d2- d1)/2 |
| 3 | аw =2/(d1+ d2) |

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №13 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Для задання руху точки натуральним способом потрібно знати: | ||
| 1 | траєкторію руху, початковий момент часу, координати точки, що рухається; |
| 2 | траєкторію руху, додатний напрямок руху, швидкість точки; |
| 3 | траєкторію руху, початок і напрямок відліку дуги |
2. Якою формулою визначається модуль швидкості точки? | ||
| 1 | |
| 2 | |
| 3 | |
3. В якій площині розміщено повне прискорення точки, що рухається? | ||
| 1 | в стичній площині; |
| 2 | в дотичній площині; |
| 3 | в нормальній площині. |
4. Чи дорівнює значення дугової координати точки в момент часу t, пройденого шляху за проміжок часу, якщо: | ||
| 1 | рух точки від початкового моменту часу до даного здійснюється в додатному напрямку; |
| 2 | рух точки від початкового моменту часу до даного здійснюється за гармонічним законом; |
| 3 | точка руху по замкнутій траєкторії. |
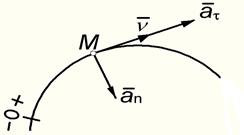
5. Вкажіть правильне направлення швидкості точки М при русі її траєкторії від точки А до точки В: | ||
| 1 | |
| 2 | |
| 3 | |
6. В якій послідовності розв’язуються задачі на рівновагу плоскої системи сил? | ||
| 1 | скласти рівняння рівноваги, розв’язати, позначити сили реакції зв’язків; |
| 2 | замінити зв’язки силами їх реакцій, скласти рівняння рівноваги, розв’язати; |
| 3 | скласти рівняння рівноваги, накреслити схему сил. |
7. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
8. Невагомий прямокутний стрижень АВС знаходиться в рівновазі. Лінія дії реакції шарніра а збігається з прямою: | ||
| 1 | AE. |
| 2 | AB. |
| 3 | AC. |
| 4 | DE. |
9. Вказати правильну відповідь. Якщо механічна система складається із вантажівА масою mА = 8 кг та С масою mС = 4 кг і ступінчастого диску В з радіусом інерції ρВ= 0,3 м (RВ = 0,4 м; rВ = 0,2 м) і масою mВ = 5 кг, то при значенні швидкості тіла А VA = 2 м/c кінетична енергія системи дорівнює: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Невагомі балка АВ і стрижень CD шарнірно з’єднанні між собою, знаходяться в рівновазі. Лінія дії реакції шарніра А збігається з прямою: | ||
| 1 | AB. |
| 2 | BE. |
| 3 | AE. |
| 4 | AD. |
11. Гвинти, які призначені для забезпечення точних переміщень та регулювань: | ||
| 1 | вантажні |
| 2 | ходові |
| 3 | встановлюючі |
12. Розрахунок муфт виконують за: | ||
| 1 | розрахунковою потужністю |
| 2 | розрахунковою кутовою швидкістю |
| 3 | розрахунковим обертаючим моментом |
13. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
14. Потужність при обертальному русі визначається за формулою: | ||
| 1 | |
| 2 | |
| 3 | |
15. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
16. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає поздовжня сила N | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
17. Напруги, які виникають в деталі, рівні 160 МПа, а граничні напруги для матеріалу деталі | ||
| 1 | 0,5; |
| 2 | 2; |
| 3 | 2,5. |
18. Зразки із сталі і дерева з однаковою площею поперечного переріза розтягуються однаковими силами. Чи будуть однаковими напруги які виникають в зразках | ||
| 1 | в стальному зразку виникнуть більші напруги, чим в дерев’яному; |
| 2 | в дерев’яному зразку виникнуть більші напруги, чим в стальному; |
| 3 | в зразках виникнуть однакові напруги. |
19. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає тільки поперечна сила Q | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
20. Чи впливає форма поперечного перерізу, при інших однакових умовах (однакові площа перерізу, матеріал, навантаження), на міцність бруса при розтягу | ||
| 1 | впливає; |
| 2 | не впливає. |
21. Ведучою ланкою у черв’ячної передачі є: | ||
| 1 | черв’ячне колесо |
| 2 | черв’ячне колесо і черв’як |
| 3 | черв’як |
22. Гвинти, які призначені для забезпечення точних переміщень та регулювань: | ||
| 1 | вантажні |
| 2 | ходові |
| 3 | встановлюючі |
23. Передача гвинт-гайка призначена для перетворення: | ||
| 1 | обертального руху в поступальний і навпаки |
| 2 | механічного руху в гідравлічний і навпаки |
| 3 | механічного руху в обертальний і навпаки |
24. Конічна передача відноситься до передач із: | ||
| 1 | паралельними осями |
| 2 | осями, що перетинаються |
| 3 | осями, що перехрещуються |




МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №14 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Якими формулами визначаються вектори швидкості і прискорення при векторному способі задання руху? | ||
| 1 | |
| 2 | |
| 3 | |
2. Вкажіть кінематичні способи задання руху точки: | ||
| 1 | векторний |
| 2 | векторний |
| 3 | векторний |
3. У якому випадку задання дугової координати точки в момент часу t дорівнює пройденому точкою шляху за час (t)? | ||
| 1 | завжди рівні; |
| 2 | початок руху і початок відліку збігаються; |
| 3 | в тому випадку, коли початок руху точки збігається з початком відліку і рух відбувається тільки в додатному напрямку. |
4. В якому випадку нормальне прискорення точки при криволінійному русі може перетворитися в нуль? | ||
| 1 | при рівномірному криволінійному русі; |
| 2 | при проходженні точки перегину траєкторії чи зміні напрямку свого руху на протилежний; |
| 3 | немає таких випадків. |
5. Вкажіть схему, на якій правильно задано рух точки натуральним способом. | ||
| 1 | |
| 2 | S=S(t) ; |
| 3 | S=S(t) ; |
6. Рівнодійна сила – це | ||
| 1 | сила, яка еквівалентна деякій системі сил; |
| 2 | сила, яка еквівалентна двом системам сил; |
| 3 | сила, яка еквівалентна взаємодії двох тіл. |
7. Головний вектор системи сил (F1 ,F2 ,F3 ), якщо F1 = F2 = F3 = F, дорівнює | ||
| 1 | R=F. |
| 2 | R=2F. |
| 3 | R= –2F. |
| 4 | R=3F. |
8. Кількість рівнянь аналітичної форми умови рівноваги просторової системи паралельних сил буде: | ||
| 1 | 2 |
| 2 | 3 |
| 3 | 4 |
| 4 | 6 |
9 | ||
| 1 | aА = 0,4 м/с2 |
| 2 | aА = 0,3 м/с2 |
| 3 | aА = 0,4 м/с2 |
| 4 | aА = 0,3 м/с2 |
10. Вимірювання коефіцієнта тертя ковзання: | ||
| 1 | Безрозмірний. |
| 2 | Н. |
| 3 | м. |
| 4 | H × м. |
11. Ведучою ланкою у черв’ячної передачі є: | ||
| 1 | черв’ячне колесо |
| 2 | черв’ячне колесо і черв’як |
| 3 | черв’як |
12. До роз’ємних з’єднань належать: | ||
| 1 | різьбові, зварні, шпонкові |
| 2 | шпонкові, шліцьові, різьбові |
| 3 | шліцьові, заклепкові, зварні |
13. Робота сили вимірюється в: | ||
| 1 | Вт ; |
| 2 | Дж ; |
| 3 | Па. |
14. . Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
15. Потужність характеризує : | ||
| 1 | швидкість руху точки; |
| 2 | швидкість виконання роботи; |
| 3 | зміну траєкторії руху. |
16. Як записується умова міцності при кручені | ||
| 1 | |
| 2 | |
| 3 | |
17. Діаметр вала визначений із умови міцності 50 мм, із умови жорсткості 40 мм, який діаметр вала необхідно остаточно прийняти, щоб задовольняв обом умовам | ||
| 1 | 50 мм; |
| 2 | 45мм; |
| 3 | 40 мм |
| 4 | 35мм |
18. Яку мінімально допустиму кутову швидкість може передати вал, якщо по розрахункам із умови міцності | ||
| 1 | |
| 2 | |
| 3 | |
19. Як записується умова жорсткості при кручені | ||
| 1 | |
| 2 | |
| 3 | |
20. Яку максимально допустиму потужність може передати вал, якщо по розрахункам: із умови міцності Р = 30 кВт, із умови жорсткості Р = 20кВт. | ||
| 1 | Р = 30кВт; |
| 2 | Р = 25кВт; |
| 3 | Р = 20кВт. |
| 4 | Р = 22кВт. |
21. Переріз клинового паса вибирають в залежності від: | ||
| 1 | передаваної потужності та очікуваної швидкості паса |
| 2 | передаваної колової сили та очікуваної швидкості паса |
| 3 | передаваного крутного моменту та очікуваної швидкості паса |
22. Замість передач з кількома клиновими пасами застосовують: | ||
| 1 | плоскопасові передачі |
| 2 | передачі з поліклиновими пасами |
| 3 | круглопасові передачі |
23. Які одноступінчасті редуктори передають крутний момент між паралельними осями? | ||
| 1 | циліндричні |
| 2 | черв’ячні |
| 3 | конічні |
24. Стандарт передбачає такі види черв’ячних передач: | ||
| 1 | циліндричні і конічні |
| 2 | циліндричні і глобоїдні |
| 3 | прямозубі і косозубі |
 .
.







МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №15 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Яким буде рух точки, якщо | ||
| 1 | рівномірно прямолінійний; |
| 2 | криволінійно рівномірний; |
| 3 | криволінійно рівнозмінний. |
2. Дотичне прискорення характеризує зміну швидкості: | ||
| 1 | за величиною; |
| 2 | за напрямком; |
| 3 | за величиною і напрямком. |
3. Які елементи визначають рух точки при натуральному способі задання руху? | ||
| 1 | нерухомий центр О, радіус-вектор, проведений з нього в дану точку; |
| 2 | траєкторія точки , довжина шляху, пройденого точкою; |
| 3 | траєкторія точки, початок і напрямок відліку дугової координати, рівняння руху S=S(t). |
4. Як правильно записати рівняння годографа швидкості? | ||
| 1 | |
| 2 | |
| 3 | |
5. Нормальне прискорення точки характеризується зміною швидкості: | ||
| 1 | за величиною при прямолінійній траєкторії; |
| 2 | за напрямком; |
| 3 | за величиною і напрямком. |
6. Статика це розділ теоретичної механіки, який вивчає : | ||
| 1 | рух тіла без урахування сил, які діють на нього; |
| 2 | умову рівноваги тіла під дією сил; |
| 3 | рух тіла з урахуванням сил, які діють на нього |
7. Кут тертя ковзання залежить від: | ||
| 1 | Коефіцієнта тертя. |
| 2 | Сили тертя. |
| 3 | Нормальної реакції. |
| 4 | Тиску тіла на поверхню тертя. |
8. Коефіцієнт тертя ковзання не залежить від: | ||
| 1 | Матеріалу тіл. |
| 2 | Нормального тиску. |
| 3 | Шершавості поверхонь тіл. |
| 4 | Вологості поверхонь тіл. |
9. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Сили тертя ковзання в точках А:В спрямовані вірно | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
11. Стандарт передбачає такі види черв’ячних передач: | ||
| 1 | циліндричні і конічні |
| 2 | циліндричні і глобоїдні |
| 3 | прямозубі і косозубі |
12. Який профіль різьби використовується для гвинтів домкратів: | ||
| 1 | дюймова |
| 2 | кругла |
| 3 | упорна |
13. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v = 2,5 м/с. | ||
| 1 | 4 Вт; |
| 2 | 25 Вт; |
| 3 | 0,25 Вт. |
14. Коефіцієнт корисної дії – це відношення: | ||
| 1 | корисної роботи до всієї затраченої роботи; |
| 2 | затраченої роботи до корисної роботи; |
| 3 | потужності до роботи. |
15. Кінетична енергія точки дорівнює: | ||
| 1 | |
| 2 | mgh |
| 3 | Ma |
| 4 | |
16. На ділянках балки вільних від рівномірно–розподільного навантаження епюра згинаючих моментів | ||
| 1 | пряма паралельна осі балки; |
| 2 | похила пряма; |
| 3 | квадратна парабола. |
17. Як записується умова міцності при згині | ||
| 1 | |
| 2 | |
| 3 | . |
18. В якій точці поперечного переріза бруса, який працює на згин, виникають максимальні нормальні напруги. | ||
| 1 | А; |
| 2 | В; |
| 3 | О. |
19. Яка із форм поперечного переріза бруса, який працює на згин буде найменш раціональною | ||
| 1 | коло; |
| 2 | квадрат; |
| 3 | прямокутник; |
| 4 | двотавр. |
20. Які деформації не допустимі при нормальній роботі конструкції | ||
| 1 | жорсткі; |
| 2 | пластичні; |
| 3 | пружні. |
21. Деталь, яка призначена для передачі крутного моменту називається: | ||
| 1 | віссю |
| 2 | підшипником |
| 3 | валом |
22. Перевірний розрахунок ланцюгових передач виконують за: | ||
| 1 | напруженнями зрізання у шарнірах ланцюга |
| 2 | напруженнями зминання у шарнірах ланцюга |
| 3 | середнім тиском у шарнірах ланцюга |
23. Основним критерієм роботоздатності ланцюгів є: | ||
| 1 | стійкість проти зрізання їх шарнірів |
| 2 | стійкість проти спрацювання їх шарнірів |
| 3 | стійкість проти зминання їх шарнірів |
24. Ланцюги, які застосовують у ланцюгових передачах називаються: | ||
| 1 | тяговими |
| 2 | вантажними |
| 3 | приводними |





МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №16 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. З якого виду рівнянь руху можна отримати рівняння траєкторії в канонічному вигляді? | ||
| 1 | 1) |
| 2 | S=S(t) ; |
| 3 | |
2. Вкажіть рівняння годографа швидкості в параметричній формі: | ||
| 1 | |
| 2 | |
| 3 | |
3. За якою формулою визначається вектор кривизни кривої в даній точці? | ||
| 1 | |
| 2 | |
| 3 | |
4. Як визначити рівняння траєкторії точки, якщо рух задано координатним способом? | ||
| 1 | рівняння траєкторії повинно задаватись; |
| 2 | виключити час t з рівнянь руху точки; |
| 3 | траєкторією є годограф радіуса-вектора точки. |
5. За якою формулою визначається дотичне прискорення точки? | ||
| 1 | |
| 2 | |
| 3 | |
6. Проекція пари сил на вісь дорівнює : | ||
| 1 | проекції однієї із сил пари; |
| 2 | 0; |
| 3 | сумі сил пари. |
7. Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб дорівнювали нулю : | ||
| 1 | Головний вектор цієї системи. |
| 2 | Головний алгебраїчний момент відносно центра зведення. |
| 3 | Головний вектор цієї системи і її головний алгебраїчний момент відносно центра зведення. |
| 4 | Сума проекцій сил системи на дві осі координат. |
8. Вказати правильну відповідь. Якщо механічна система складається із вантажівА масою mА = 8 кг та С масою mС = 4 кг і ступінчастого диску В з радіусом інерції ρВ= 0,3 м (RВ = 0,4 м; rВ = 0,2 м) і масою mВ = 5 кг, то при значенні швидкості тіла А VA = 2 м/c кінетична енергія системи дорівнює: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
9 φ = 0,5t2 − 0,2t (рад), а його радіус має значення R = 0,4 м, то в заданий момент часу t1 = 1 c прискорення тіла А і точки М диска становлять: | ||
| 1 | aА = 0,4 м/с2; aМ = 0,475 м/с2; |
| 2 | aА = 0,3 м/с2; aМ = 0,169 м/с2; |
| 3 | aА = 0,4 м/с2; aМ = 0,346 м/с2; |
| 4 | aА = 0,3 м/с2; aМ = 0,245 м/с2. |
10. Теорема Варіньона про момент рівнодійної системи сил стверджує, що момент рівнодійної відносно довільної точки: | ||
| 1 | Завжди дорівнює нулю. |
| 2 | Завжди відмінний від нуля. |
| 3 | Дорівнює геометричній сумі моментів системи сил відносно цієї точки. |
| 4 | Не дорівнює геометричній сумі моментів системи сил відносно цієї точки. |
11. Які одноступінчасті редуктори передають крутний момент між паралельними осями? | ||
| 1 | циліндричні |
| 2 | черв’ячні |
| 3 | конічні |
12. Які шпонки належать до ненапружених: | ||
| 1 | призматичні і сегментні |
| 2 | призматичні і клинові |
| 3 | сегментні і тангенціальні |
13. Зміна кінетичної енергії матеріальної точки дорівнює: | ||
| 1 | роботі сили, що діє на неї на пройденому шляху; |
| 2 | імпульсу сили за час її дії; |
| 3 | сумі сил, які діють на точку. |
14. Потужність при обертальному русі визначається за формулою: | ||
| 1 | |
| 2 | |
| 3 | |
15. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
16. Напруги, які забезпечують безпечну роботу конструкції називаються: | ||
| 1 | граничними; |
| 2 | розрахунковими; |
| 3 | допустимими. |
17. До яких граничних напруг, які є механічними характеристиками матеріалу, можна навантажувати брус до появи пластичних деформацій: | ||
| 1 | границя пружності; |
| 2 | границя текучості; |
| 3 | границя пропорційності; |
| 4 | границя міцності. |
18. Як записати закон Гука при розтягу | ||
| 1 | |
| 2 | |
| 3 | |
19. В якому із варіантів брус буде міцний, якщо допустимі напруги для матеріалу з якого він виготовлений 140 МПа. Розрахункові напруги. | ||
| 1 | 150 МПа ; |
| 2 | 160 МПа ; |
| 3 | 120МПа. |
20. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає поздовжня сила N | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
21. В маркуванні підшипника кочення тип підшипника позначено цифрою 7: | ||
| 1 | шарикопідшипник радіальний |
| 2 | роликопідшипник радіально-упорний з конічними роликами |
| 3 | роликопідшипник радіальний з короткими циліндричними роликами |
22. В маркуванні підшипника кочення серія позначена цифрою 2: | ||
| 1 | середня серія |
| 2 | важка серія |
| 3 | легка серія |
23. Підшипники, які сприймають осьові навантаження називаються: | ||
| 1 | упорними |
| 2 | радіальними |
| 3 | радіально-упорними |
24. Вали розраховують на: | ||
| 1 | міцність і стійкість |
| 2 | міцність і жорсткість |
| 3 | стійкість і жорсткість |
 .
.


МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №17 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Нормальне прискорення точки характеризується зміною швидкості точки: | ||
| 1 | за напрямком; |
| 2 | за величиною; |
| 3 | за величиною і напрямком. |
2. Що називається годографом швидкості і які його параметричні рівняння? | ||
| 1 | годографом швидкості називається геометричне місце кінців векторів швидкості рухомої точки, відкладених від однієї і тієї ж довільної точки простору : |
| 2 | лінія, яку описує вектор швидкості: |
| 3 | лінія, яку описує кінець вектора швидкості: |
3. За якою формулою визначається величина швидкості точки при координатному способі задання руху? | ||
| 1 | |
| 2 | |
| 3 | |
4. Вкажіть формулу для визначення радіуса кривизни траєкторії. | ||
| 1 | |
| 2 | |
| 3 | |
5. Для задання руху точки натуральним способом потрібно знати: | ||
| 1 | траєкторію руху, початковий момент часу, координати рухомої точки; |
| 2 | траєкторію руху, позитивний напрямок руху, швидкість точки; |
| 3 | траєкторію руху, початок і напрямок відліку дуги S, закон руху точки по траєкторії. |
6. Рівнодійна сила – це | ||
| 1 | сила, яка еквівалентна деякій системі сил; |
| 2 | сила, яка еквівалентна двом системам сил; |
| 3 | сила, яка еквівалентна взаємодії двох тіл. |
7. Кількість рівнянь аналітичної форми умови рівноваги просторової системи паралельних сил буде: | ||
| 1 | 2 |
| 2 | 3 |
| 3 | 4 |
| 4 | 6 |
8 | ||
| 1 | aА = 0,4 м/с2; aМ = 0,475 м/с2; |
| 2 | aА = 0,3 м/с2; aМ = 0,169 м/с2; |
| 3 | aА = 0,4 м/с2; aМ = 0,346 м/с2; |
| 4 | aА = 0,3 м/с2; aМ = 0,245 м/с2. |
9. Якщо проекція сили | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Вимірювання коефіцієнта тертя ковзання: | ||
| 1 | Безрозмірний. |
| 2 | Н. |
| 3 | м. |
| 4 | H × м. |
11. Замість передач з кількома клиновими пасами застосовують | ||
| 1 | плоскопасові передачі |
| 2 | передачі з поліклиновими пасами |
| 3 | круглопасові передачі |
12. Які два типи шліцьових з’єднань стандартизовані? | ||
| 1 | з’єднання з трикутними шліцами і прямо бічні з’єднання |
| 2 | прямо бічні з’єднання і з’єднання з евольвентними шліцами |
| 3 | з’єднання з евольвентними шліцами і з’єднання з трикутними шліцами |
13. Чому дорівнює робота сили ваги при горизонтальному переміщенні тіла: | ||
| 1 | добутку сили ваги на переміщення; |
| 2 | 0; |
| 3 | добутку сили ваги на швидкість тіла. |
14. Коефіцієнт корисної дії – це відношення: | ||
| 1 | корисної роботи до всієї затраченої роботи; |
| 2 | затраченої роботи до корисної роботи; |
| 3 | потужності до роботи. |
15. Потужність характеризує : | ||
| 1 | швидкість руху точки; |
| 2 | швидкість виконання роботи; |
| 3 | зміну траєкторії руху. |
16. Напруги, які виникають в деталі, рівні 160 МПа, а граничні напруги для матеріалу деталі | ||
| 1 | 0,5; |
| 2 | 2; |
| 3 | 2,5. |
17. Зразки із сталі і дерева з однаковою площею поперечного переріза розтягуються однаковими силами. Чи будуть однаковими напруги які виникають в зразках | ||
| 1 | в стальному зразку виникнуть більші напруги, чим в дерев’яному; |
| 2 | в дерев’яному зразку виникнуть більші напруги, чим в стальному; |
| 3 | в зразках виникнуть однакові напруги. |
18. Визначити вид деформації бруса, якщо в його поперечному перерізі виникає тільки поперечна сила Q | ||
| 1 | згин; |
| 2 | кручення; |
| 3 | зріз; |
| 4 | розтяг. |
19. Чи впливає форма поперечного перерізу, при інших однакових умовах (однакові площа перерізу, матеріал, навантаження), на міцність бруса при розтягу | ||
| 1 | не впливає. |
| 2 | впливає. |
20. Як записується умова міцності при кручені | ||
| 1 | |
| 2 | |
| 3 | |
21. Який профіль різьби використовується для гвинтів домкратів: | ||
| 1 | дюймова |
| 2 | кругла |
| 3 | упорна |
22. Муфти, які дають змогу з’єднувати і роз’єднувати вали як на ходу, так і під час зупинки: | ||
| 1 | самодіючі |
| 2 | керовані |
| 3 | некеровані |
23. Підшипники кочення підбирають за: | ||
| 1 | динамічною вантажопідйомністю |
| 2 | довговічністю |
| 3 | статичною вантажопідйомністю |
24. Що означають у маркуванні підшипника кочення дві останні цифри 12: | ||
| 1 | діаметр внутрішнього кільця підшипника 120 мм |
| 2 | діаметр внутрішнього кільця підшипника 60 мм |
| 3 | діаметр зовнішнього кільця підшипника 60 мм |
 .
.
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОРДЕНА «ЗНАК ПОШАНИ» ВИЩЕ ПРОФЕСІЙНЕ УЧИЛИЩЕ №75 КОМПЛЕКСНА КОНТРОЛЬНА РОБОТА ВАРІАНТ №18 з дисципліни: Технічна механіка спеціальність: 208 Агроінженерія освітньо-професійна програма: «Агроінженерія»
Здобувач вищої освіти _________________________________________________ (П.І.Б.) Курс ______ Група _____ Дата «___» ________ 2019 р. Початок роботи ________ год._____ хв. Завершення роботи ______ год. ____ хв. | ||
1. Вкажіть правильну форму швидкості при векторному способі задання руху: | ||
| 1 | |
| 2 | |
| 3 | |
2. При якому способі задання руху точки задається траєкторія? | ||
| 1 | при координатному способі; |
| 2 | при векторному способі; |
| 3 | при натуральному способі. |
3. За заданим рівнянням руху точки встановити вигляд її траєкторії | ||
| 1 | коло ; |
| 2 | еліпс; |
| 3 | парабола. |
4. Якщо протягом деякого часу виконується умова | ||
| 1 | рівномірно по криволінійній траєкторії; |
| 2 | прямолінійно рівномірно; |
| 3 | прямолінійно нерівномірно. |
5. Щоб правильно задати рух точки натуральним способом, необхідно знати: | ||
| 1 | координати точки, траєкторію точки; |
| 2 | |
| 3 | траєкторію точки, початок і напрямок відліку дугової координати, рівняння руху S=S(t). |
6. В якій послідовності розв’язуються задачі на рівновагу плоскої системи сил? | ||
| 1 | скласти рівняння рівноваги, розв’язати, позначити сили реакції зв’язків; |
| 2 | замінити зв’язки силами їх реакцій, скласти рівняння рівноваги, розв’язати; |
| 3 | скласти рівняння рівноваги, накреслити схему сил. |
7. На тіло в площині Oyz діють дві пари сил з моментами m1 і m2. Якщо m1 > m2 , то, як вектор, їх сума спрямована: | ||
| 1 | Уздовж осі Ox. |
| 2 | Протилежно осі Ox. |
| 3 | Уздовж осі Oy . |
| 4 | Уздовж осі Oz. |
8. Вимірювання коефіцієнта тертя ковзання: | ||
| 1 | Безрозмірний. |
| 2 | м. |
| 3 | H \м. |
| 4 | Н. |
9. Для пар сил з моментами m1,m2 і m3 , що лежать відповідно у площинах Oxy,Oyz,Oxz , модуль їх суми дорівнює: | ||
| 1 | |
| 2 | |
| 3 | |
| 4 | |
10. Кут тертя ковзання залежить від: | ||
| 1 | Коефіцієнта тертя. |
| 2 | Сили тертя. |
| 3 | Нормальної реакції. |
| 4 | Тиску тіла на поверхню тертя. |
11. Переріз клинового паса вибирають в залежності від: | ||
| 1 | передаваної потужності та очікуваної швидкості паса |
| 2 | передаваної колової сили та очікуваної швидкості паса |
| 3 | передаваного крутного моменту та очікуваної швидкості паса |
12. Ланцюги, які застосовують у ланцюгових передачах називаються: | ||
| 1 | тяговими |
| 2 | вантажними |
| 3 | приводними |
13. Якою буде потужність сили F = 10 Н, при швидкості руху тіла v = 2,5 м/с. | ||
| 1 | 4 Вт; 2) 3) 0,25 Вт. |
| 2 | 25 Вт; |
| 3 | 15Вт |
| 4 | 0,25 Вт. |
14. Динаміка - це розділ теоретичної механіки, який вивчає: | ||
| 1 | умову рівноваги тіла під дією сил; |
| 2 | рух тіла з урахуванням сил, які діють на нього; |
| 3 | рух тіла без урахування сил. |
15. Кінетична енергія точки дорівнює: | ||
| 1 | mg |
| 2 | mgh |
| 3 | |
| 4 | ma |
16. Діаметр вала визначений із умови міцності 50 мм, із умови жорсткості 40 мм, який діаметр вала необхідно остаточно прийняти, щоб задовольняв обом умовам | ||
| 1 | 50 мм; |
| 2 | 45мм; |
| 3 | 40 мм |
17. Яку мінімально допустиму кутову швидкість може передати вал, якщо по розрахункам із умови міцності | ||
| 1 | |
| 2 | |
| 3 | |
18. Як записується умова жорсткості при кручені | ||
| 1 | |
| 2 | |
| 3 | |
19. Яку максимально допустиму потужність може передати вал, якщо по розрахункам: із умови міцності Р = 30 кВт, із умови жорсткості Р = 20кВт. | ||
| 1 | Р = 30кВт; |
| 2 | Р = 25кВт; |
| 3 | Р = 20кВт. |
| 4 | Р = 22кВт. |
20. Яка із форм поперечного переріза бруса, який працює на згин буде найменш раціональною | ||
| 1 | коло; |
| 2 | квадрат; |
| 3 | прямокутник; |
| 4 | двотавр. |
21. Які два типи шліцьових з’єднань стандартизовані? | ||
| 1 | з’єднання з трикутними шліцами і прямо бічні з’єднання |
| 2 | прямо бічні з’єднання і з’єднання з евольвентними шліцами |
| 3 | з’єднання з евольвентними шліцами і з’єднання з трикутними шліцами |
22. Які шпонки належать до ненапружених: | ||
| 1 | призматичні і сегментні |
| 2 | призматичні і клинові |
| 3 | сегментні і тангенціальні |
23. До роз’ємних з’єднань належать: | ||
| 1 | різьбові, зварні, шпонкові |
| 2 | шпонкові, шліцьові, різьбові |
| 3 | шліцьові, заклепкові, зварні |
24. Розрахунок муфт виконують за: | ||
| 1 | розрахунковою потужністю |
| 2 | розрахунковою кутовою швидкістю |
| 3 | розрахунковим обертаючим моментом |